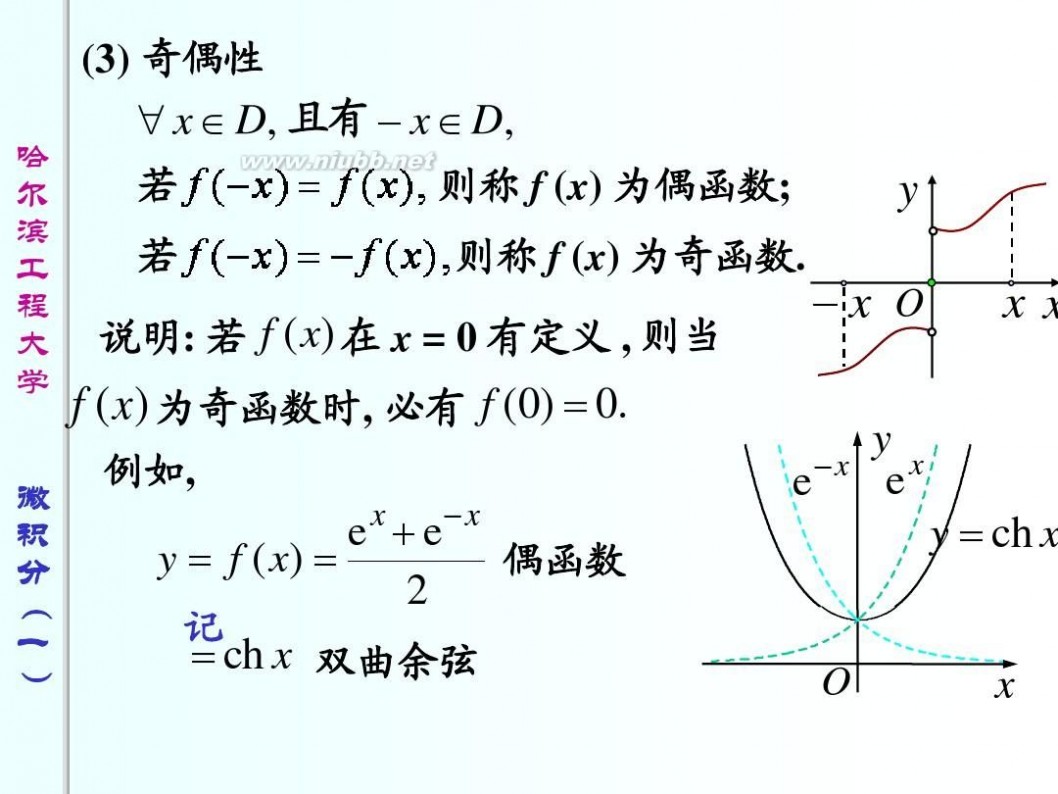
一 : Anna_Sui (1)
二 : sy1-1

sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1

sy什么意思 sy1-1

sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1

sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1

sy什么意思 sy1-1
sy什么意思 sy1-1

sy什么意思 sy1-1

sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
sy什么意思 sy1-1
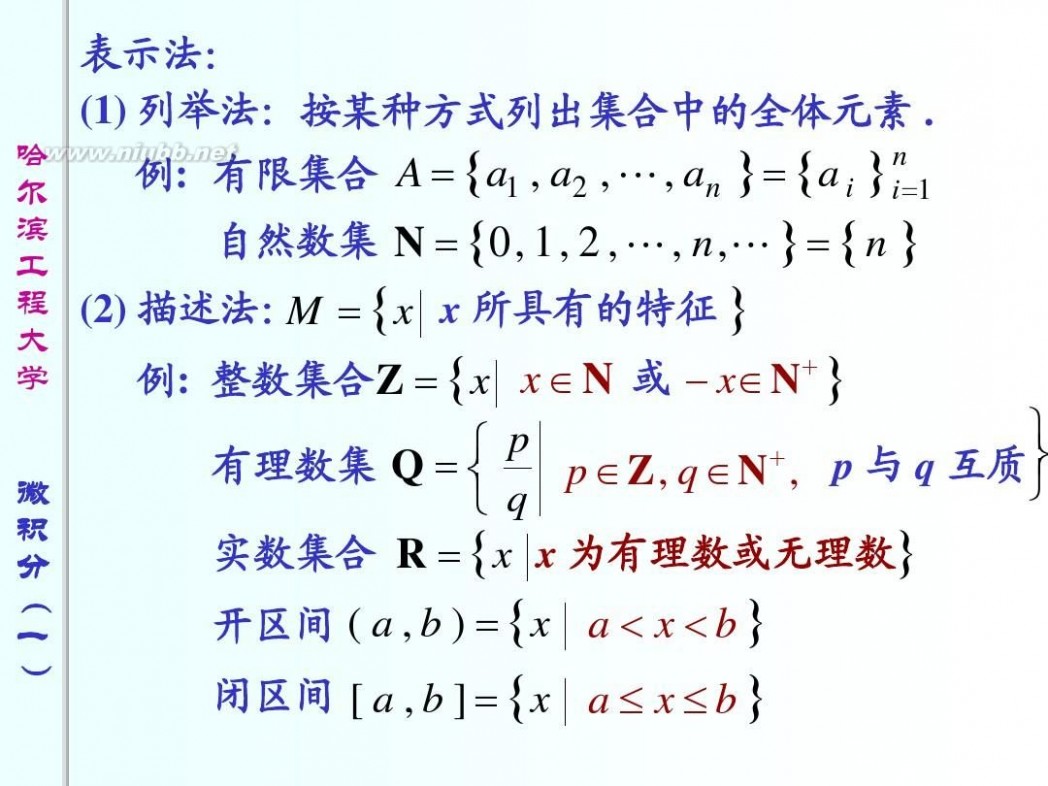
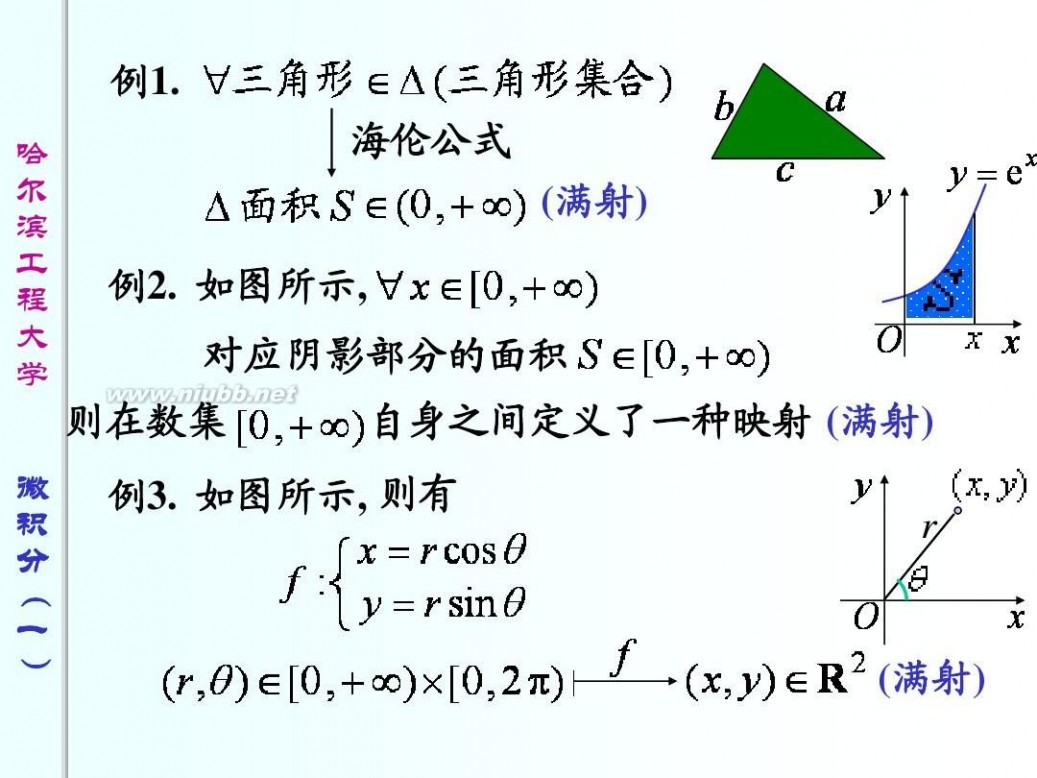
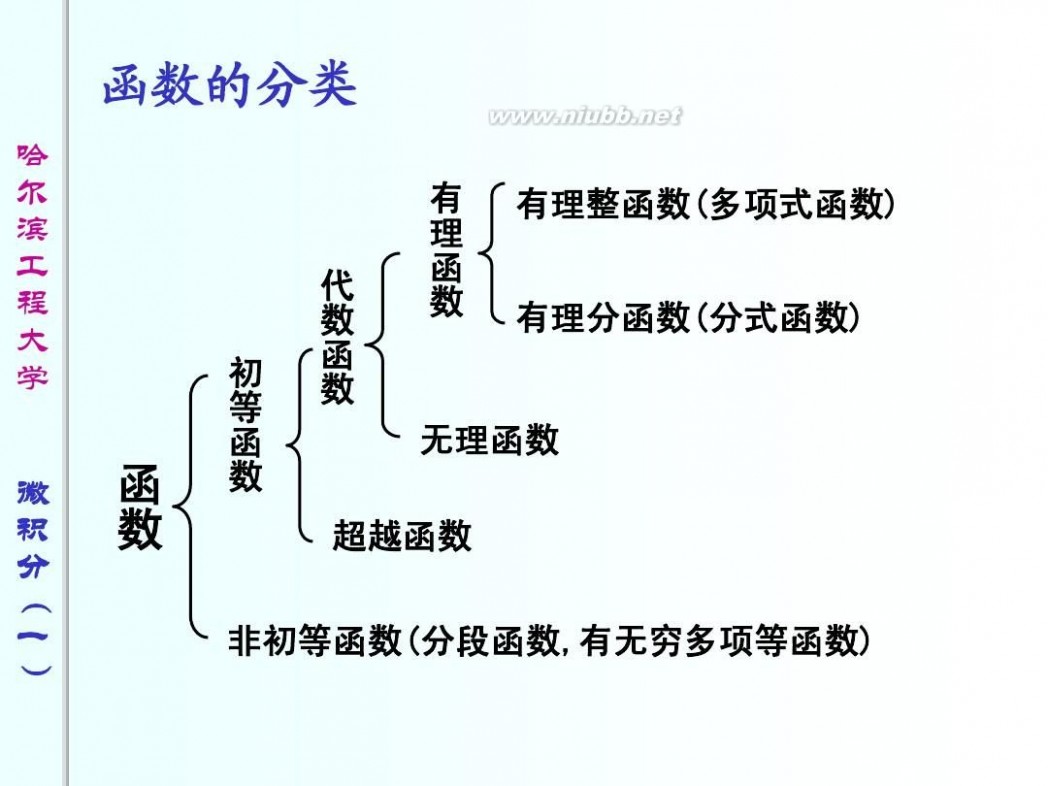
三 : 1.1NatureofBusinessActivity
IBBM对于大多数初高中生来说都是一门新的学科,开始接触一些基础的商业知识内容,但对于缺乏社会经验的学生来讲感到知识内容非常的抽象,不易理解。其实,如果在教学过程中能够有效的联系实际,学生会发现商业里的知识内容与我们的生活息息相关。大多数学生在学习过程中通常会遇到以下问题:一是商业词汇量较大,二是在学习中不易抓住学习的重点。各个学校比较通用的一本商业书是IBID出版社由PaulHoang编著,当前已有两个版本。书的知识内容非常丰富,案例也比较多,目的是有助于学生理解商业概念,但也给学生带来很大的阅读量。通过多年的教学经验,其实无论是SL还是HL,每个章节的重点难点是非常集中而具体的。因此,希望通过整理一些笔记帮助大家去学习。如果有兴趣的同学或正在学习IBBM的同学有任何疑问,欢迎直接加QQ1453433634直接与沈老师交流。
1.1 Nature of BusinessActivity
这一节单独出考题的可能性较小,但是却是学习商管的入门内容。在这一节中,首先介绍了一些基础概念,带领人们推开商管的大门。先是五部分SL的内容,另外是一部分HL的内容。
1- what is abusiness.
A business is adecision-making organization involved in the process of usinginputs to produce goods and/or to provide services.
这是课本中对business的定义。其中有几个关键词需要记忆:首先是decision-making,决策是组织的核心;其次是inputs→outputs(outputs根据产出的类型不同分为有形的goods和无形的services).
了解了business的概念,就要探求它存在的目的。任何事物都具有存在的合理性,那么business产生与存在的目的是什么呢?实际上,这也是社会进步的产物,是社会发展的必然。Business实际上是为了满足人们的needsand wants而存在的。Needs是人类生存所必不可少的,如水、食物、衣服;而 wants代表了人们为了提高生活质量所产生的更高需求,如汽车代替自行车,手机代替固定电话等。这就是business存在的意义。
2-Factors of production(factor inputs)
为了满足人们的需要和需要,就要生产出人们所需的产品,在生产之初企业必定先要投入,也就是我们前面提到的inputs.投入要素主要由四部分组成:land,labor, capital, enterprise. 投入经过企业的一系列流程便有了产出,即outputs/product.有形的outputs我们称为goods,而无形的outputs称为service.企业在转化的这一过程中,也随即产生了一些剩余或是利润,那是由于产品在这一过程中发生了addingvalue. Adding value=value of outputs-value of inputs.
www.thetopedu.com 青藜苑教育 010-62895997 13021951457 QQ:1453433634
3-specialization
Specialization means thata business concentrates on the production of a particular good orservice or a small range of similar products.
随着技术的不断发展,企业越来越追求专业化。专业化不仅可以为企业带来独一无二的认知度,也可以提高productivity andefficiency,从而为企业带来巨大的profitmargin。如,Iphone特有技术的专业化使苹果于2011年第二季度一举超越了NOKIA,成为全球手机发货量的大赢家。专业化从小范围的个人到大范围的国家,可以划分为5个层面:
Individual个人专业化,如lawyer,teacher;
Department部门专业化,如marketing,production;
Coporate企业专业化,如Hilton→hotel,Sony→Electronicgoods;
Regional区域专业化,如Wall street→financialservice, Zhongguancun→electronic products;
National国家专业化,如France→perfume,Brazil→coffee.
4-Businessfunctions
一般来说,现代企业内部的结构设置就是依据企业的四大职能划分的。如果你留意企业内存在的部门,你会发现企业内往往设置了productiondepartment, marketing department, finance department and humanresource department.
实际上,以上四大职能部门表明了企业所具有的四项职能。本书从第二单元至第五单元便依次详细分析了各个职能的意义和作用。
www.thetopedu.com 青藜苑教育 010-62895997 13021951457 QQ:1453433634
5-businesssectors
根据企业所处的生产阶段,企业可以划分为三大行业:Primary sector, Secondarysector and Tertiary sector.
Primary sector是我们常说的第一产业,以农业为主,还包含fishing,mining,oilextraction.主要特征表现在企业从事的是将自然界中的自然资源提取出来。
Secondary sector是指第二产业,也是我们常说的制造业,如clothesmamufacture,publish firms etc.
Tertiary sector指第三产业,特指服务业。如retailing,education,travel,transportetc.
Primaryproduction→Manufacturing production→Tertiaryproduction→Customer
企业的产品依以上的流程最终传递到消息者手中。在判断一个国家的发展程度时,看三大产业所占的比重及人口在三大产业中的分布是一个重要标准。一般来说,第三产业所占比重越大,表明该国家越发达;第三产业中的人口越多,也表明该国家发达程度越高。看到了吧,多学商管知识,有助于增加你的常识哦。
www.thetopedu.com 青藜苑教育 010-62895997 13021951457 QQ:1453433634
H1-changes in economicstructure
这是HL的学生需要掌握的内容,SL的学生可以跳过了哈。
实际上,这一部分是上一个问题的扩展内容。每个国家都期望得到不断的发展,从而跻身于发达国家的行列,因为经济结构必然存在着一个转移趋势:Primary→Manufacturing→Tertiary。就是说国家会不断的降低第一产业的产出比重,从而提升第三产业的产出,劳动力不断的从第一产业向第二、三产业转移。在这一过程中,促进这种转移的因素有higherhousehold incomes, more leisure time, larger focus on CRM,increasing reliance on support service.
四 : 35YUANLI[1]
步进电动机高精度细分方法及其控制系统
叶韦韦 华南师范大学电信工程系99级
引 言
本论文题目来自对现有椭偏仪进行技术改进工作中的“用步进电机取代传统直流减速电机”的研究课题。椭圆偏振测量技术是一种测量薄膜厚度和研究其表面特性的先进方法,具有灵敏度高、精度高、实时和无损样品的优点。在半导体、光学材料、表面物理、化工、冶金、生物和医学等领域都有重要应用。
传统的椭偏仪由于使用了直流电机,在定位过程中存在自动化水平低、操作复杂、精度难以保证和成本高(因需要配高精度光电旋转编码器)等不足,为提高椭偏仪的定位精度和自动化水平,研制出一种高精度自动定位系统无疑具有十分重要的意义。
本系统采用步进电机代替直流电机,但现有步进电机的最小步距角还未能达到本系统的要求,所以要在步进细分技术上作探讨。利用步进电机的准确动作和步进电机的细分技术,解决椭偏仪的角度与光强必须准确对应关系的问题。其中,当步进电动机的细分角度越小,越有利于提高步进电动机的角位、点位及连续控制方面的定位精度,越有利于与计算机联机,实现全自动化控制。同时,还可以大大提高步进电机的分辨率,大大改善步进电动机在动态运转时的特性。
由于工业技术的不断进步,在自动化控制、精密机械加工、航空航天技术以及所有要求高精度定位、自动记录、自动瞄准等高新技术领域内,对步进电机的细分要求也越来越高。
因此,多年来,国内外的同行都在努力寻求步进电动机细分技术的最佳方案及最高细分精度。本文所介绍的自动定位系统是在原椭偏仪系统的前提下,采用步进电机计算机细分控制技术建立起来的。
一. 一. 步进电机的基本原理
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域
都有应用。
步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。
现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度 或15度;
反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。
混合式步进电机是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为广泛,也是本次细分驱动方案所选用的步进电机。
步进电机的一些基本参数: 电机固有步距角:
它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如86BYG250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
步进电机的相数:
是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为0.36°/0.72° 。在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己步距角的要求。如果使用细分驱动器,则‘相数’将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。
保持转矩(HOLDING TORQUE):
是指步进电机通电但没有转动时,定子锁住转子的力矩。它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
DETENT TORQUE:
是指步进电机没有通电的情况下,定子锁住转子的力矩。DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
步进电机的一些特点:
1. 1.一般步进电机的精度为步进角的3-5%,且不累积。
2. 2.步进电机外表允许的最高温度。
步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
3. 3.步进电机的力矩会随转速的升高而下降。
当步进电机转动时,电机各相绕组的电感将形成一个反向电动势;频率越高,反向电动势越大。在它的作用下,电机随频率(或速度)的增大而相电流减小,从而导致力矩下降。
4.步进电机低速时可以正常运转,但若高于一定速度就无法启动,并伴有啸叫声。
步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。在有负载的情况下,启动频率应更低。如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
步进电动机以其显著的特点,在数字化制造时代发挥着重大的用途。伴随着不同的数字化技术的发展以及步进电机本身技术的提高,步进电机将会在更多的领域得到应用。
二. 二. 步进电机驱动器的原理
步进电机的运行要有一电子装置进行驱动, 这种装置就是步进电机驱动器, 它是把控制系统发出的脉冲信号,加以放大以驱动步进电机。步进电机的转速与脉冲信号的频率成正比,控制步进脉冲信号的频率,可以对电机精确调速;控制步进脉冲的个数,可以对电机精确定位。
典型的步进电机驱动控制系统主要由三部分组成: 1. 步进控制器,由单片机实现。
2.驱动器,把单片机输出的脉冲加以放大,以驱动步进电机。 3.步进电机。
典型的步进电机驱动控制电路图如下:
图中单片机的I/O口一位控制一相绕组,根据所选定的步进及控制方式可写出相应的控制方式的数学模型,如三相单三拍、三相双三拍、三相六拍。
现以三相六拍为例: 步序 控 制 位 C B A A AB B BC C CA
D7 1 1 1 1 1 1
D6 1 1 1 1 1 1
D5 1 1 1 1 1 1
D4 1 1 1 1 1 1
D3 1 1 1 1 1 1
D2 0 0 0 1 1 1
D1 0 1 1 1 0 0
D0 1 1 0 0 0 1
控制模型 F9H FBH FAH FEH FCH FDH
以上为步进电机正转时的控制顺序及数学模型。因此,步进驱动控制器实际上就是按上述的控制方式所规定的顺序送脉冲序列,即可实现驱动步进电机三相六拍方式的转动。输入顺序脉冲序列的速率就是步进电机的速率。
这种典型的步进电机驱动控制方法及其电路,只能实现步进电机步距角为原来固定步距角的一半。当要求实现步距角细分时,该方法就不能达到要求了,所以在这里就要引入步进电机细分技术方案的探讨。
一. 三. 细分技术方案探讨
细分的基本概念为:步进电机通过细分驱动器的驱动,其步距角变小了。如驱动器工作在10细分状态时,其步距角只为‘电机固有步距角’的十分之一,也就是:当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动1.8°;而用细分驱动器工作在10细分状态时,电机只转动了0.18°。细分功能完全是由驱动器靠精确控制电机的相电流所产生的,与电机无关。
步进电机的细分技术实质上是一种电子阻尼技术(请参考有关文献),其主要目的是提高电机的运转精度,实现步进电机步距角的高精度细分。其次,细分技术的附带功能是减弱或消除步进电机的低频振动,低频振荡是步进电机(尤其是反应式电机)的固有特性,而细分是消除它的唯一途径,如果步进电机有时要在共振区工作(如走圆弧),选择细分驱动器是唯一的选择。
驱动器细分后的主要优点为:完全消除了电机的低频振荡;提高了电机的输出转矩,尤其是对三相反应式电机,其力矩比不细分时提高约30-40% ;提高了电机的分辨率,由于减小了步距角、提高了步距的均匀度,‘提高电机的分辨率’是不言而喻的。
以上这些优点,尤其是在性能上的优点,并不是一个量的变化,而是质的飞跃。
因此,在性能上的优点是细分的真正优点。由于细分驱动器要精确控制电机的相电流,所以对驱动器要有相当高的技术要求。
目前,国内外的步进电动机细分技术的最高微步距细分水平为25.5″,而随着科学和工业技术发展,这一细分水平对于目前很多要求5″以下的微步距角来说,仍远远不能满足要求。为什么长期以来步进电动机的细分技术停留在25.5″的水平上而不能再细分?
对这一问题的研究结果表明,现有技术大多采用以下两种细分方法: 方法一:
首次获得较高分辨率的细分方法采用的是一种称为:半拍步进的方法,即在对步进电动机的步距角进行细分时,将步进电动机的控制位置数(以四相混合式步进电动机为例)的四拍通电逻辑顺序变为八拍通电逻辑顺序,从而将步进角降为原来的一半。以后在这种方法的基础上继续改进为电流合成矢量ih,使ih不是一下变动45个电角度,而是一次变化一个较小的角度θf,这样就将步距角由原来的45°变为后来较小的微步距角θf。当通电时,电流合成矢量在0~45°范围内,仅让一相绕组的电流在变化,即只有ia在变化,ib不变;在45°~90°范围内,仅让ib一组绕组的电流变化,ia不变。这种细分驱动方法的优点是只需要改变某一相的电流值,因此在硬件电路的设计上就比较容易实现。但这种方法却带来了一个不可克服的缺陷,即电流合成矢量ih在旋转过程中的幅值是处在不断变化中,从而引起滞后角的不断变化。当细分数很大、微步距角非常小时,滞后角变化的差值△θ已大于所要求细分的微步距角,使得微步距角的继续细分实际上失去了意义。采用现有技术细分方法的电流矢量旋转示意图如图1。
现有技术的距角特性曲线中反映的滞后角△θ对细分的影响如下图: (纵轴T表示转距,横轴θ表示转子的位置转角
)
方法二:
利用单片机的脉冲宽度可调波(PWM),使原来的一个矩形脉冲波分解成一个阶梯波形,若设原来阶梯波角度为θ,则按阶梯波的步距角应为θ/n,其中n为阶梯波的个数。其优点是在阶梯波驱动步进电机的时候,虽然能通过单片机产生的PWM波很灵活地改变输出脉冲的高低和长短,从而实现步进电机的柔性控制和实现驱动大功率的步进电动机。但由于驱动电路复杂和在定位的时候可能会产生振动,若其振动的角度超过了细分的最小角度,则不适合高精密仪器的定位要求。
另外,步进电机按运行频率工作时,启动和停止都需要有一个缓慢的升频和降频的过程。启动时,可在启动频率之下启动步进电机,然后逐渐上升到运行频率;停止时,先将频率逐渐降低到启动频率以下才能停止。特别是负载转动惯性比较大时,该现象很明显以致严重地影响到细分步进转角的非线性和均匀旋转的控制。
这就是现有细分技术方案不能达到超高分辨的根本原因。为解决这个问题,很多资料都曾经提出对细分电流进行修正的方法,但一直未见一个实用、统一的数学模型及可行的细分
35YUANLI[1]_yuanli
方法问世。
四. 系统设计
1.细分电路的设计
针对上述两种现有的细分技术状况,本论文的目的在于:
1. 从理论和实践的角度,建立一种新的步进电动机高精度细分方法和数学模型,以消除现有技术方案中不可克服的滞后角△θ值所引起的问题,使细分技术提高到更高的水平。
2. 在新原理方法指导下设计相应的硬件控制电路。
3. 设计细分控制函数修正的电路及其相应的计算机自动控制程序。
本电路的构思及技术解决方案叙述如下:
为了实现高精度的定位,对步进电机步距进行高分辨细分的关键,也是本系统的难点
所在。从以上的分析可知,步进电动机的细分驱动电路都是通过电流合成矢量的旋转来实现的。一般的细分方法只改变某一相的电流,该方法的缺陷是电流合成矢量的幅值是不断变化的,使步进电机的传距亦随之变化,从而引起滞后角的变化,最终就影响可细分数的增加,即限制了分辨率的提高。
采用现有技术细分方法时的电流矢量旋转示意图(图1):
为了能够从根本上解决这个问题,消除现有技术中由于滞后角的变化引起的△θ值大
于微步距角而导致不可继续细分的问题,只有使电流合成矢量ih形成新的距角特性曲线,为达到这一点,必须满足一下两个条件:
1. 电流合成矢量旋转时每次变化的角度要均匀;
2. 电流合成矢量的大小或幅值要保持不变。
基于这个条件,即可建立“电流矢量恒幅均匀旋转”细分驱动方法。同时改变两相电流
的大小,使电流合成矢量恒幅均匀旋转。这种方式可称为步进电机的模拟运行,它是一种基于交流同步电机概念的特殊细分技术,实质是对运行于交流同步电机状态的步进电机所受的交流模拟信号在一个周期内细分,即每个细分点对应于一个交流值。当细分数相当大时,例如本系统中将一个四分之一周期分成4096个点,电机绕组的电流信号就逼近模拟连续信号。这种细分技术可以极大地提高步进电机的分辨率和运行稳定性。
采用该方法时,电流合成矢量的旋转示意图如下:
图中得ia﹑ib﹑ih分别表示A,B两相电流矢量及两相电流合成矢量。
本电路的细分方法其特征在于:
步骤一:建立一种可消除滞后角变化影响的步进电动机的细分控制函数数学模型:
ia=im*cosX
ib=im*sinX
式中: ia-A相绕组电流
ib-B相绕组电流
x-控制参数
im-电流幅值
cosx-控制参数余弦值
sinx-控制参数正弦值
步骤二:对运行于交流同步电机状态的步进电机所受控的交流模拟信号在一个周期内细分,每个细分点对应一个交流值。
步骤三:按照细分控制数学模型对A﹑B两相绕组电流通过步距角细分控制电路实施控制, 控制过程为:
由单片机送来的数字量电压控制信号,经D/A转换器转换为模拟量的电压信号,再送到放大驱动电路上,经放大后直接送到步进电动机的四相绕组,并在四相绕组上加上电压负反馈以保证电压放大的稳定性。四相绕组分别取得正﹑余弦变化电流和零电平,通过电流合成矢量的驱动方式,驱动电动机的旋转,这样每输入一个数字量,电机转子就步进一个微步距角θf。
步骤四:对影响细分控制精度的非线性,通过细分控制修正表和相应的单片机修正程序对细分正﹑余弦表实施修正。
基于以上细分方法及其特征,本论文的步进电机控制系统是在原有典型的步进电机驱
动控制电路基础上建立起来的,驱动控制电路利用MCS51系列单片机与12位D/A转换器(DAC8413)构成高精度细分的开环自动定位系统,通过“电流矢量恒幅均匀旋转”细分驱动方法实现高精度定位,大大提高步进电机的分辨率和改善步进电机在动态运转时的特性。
使用上述原理建立的系统框图如下:
2.D/A芯片的选择
D/A转换器把单片机的数字控制量转换为模拟的电压信号,经放大后直接控制电机。所以,D/A芯片的选择关系到细分技术的方案要求。
我选用的D/A芯片是AD公司的DAC8413。它的概述为:
DAC8413是在单片电路芯片上集成四个12位电压输出数模变换器(DAC)。每一DAC都有一个双重缓冲的输入锁存结构,并有回读功能。全部DAC都通过一个12位并行I/O口与微处理发生读写操作。容许用户同时将DAC输出复位到零,而不考虑输入锁存器的内容。任一DAC和全部DAC都可以被置于透明模式,使输出能根据输入数据立即响应。
DAC8413的特性:
1.+5伏到+/-15伏工作电压
2.单极性或双极性输出
3.实际的电压输出
4.双重缓冲的输入锁存结构
5.复位到零或复位到中点的干预
6.高速总线存取时间
7.回读功能
DAC8413的应用:
可用于自动测量设备,数字控制校准系统,控制伺服系统,过程控制系统。
使用DAC8413的原因:
1.利用数模转换器的12位并行I/O口,把四分之一的四相驱动电流周期即一个步距分成4096级,也就是2的12次方,达到电压高精度的细分要求。
2.DAC8413四个完整的电压输出数模转换器,能直接输出0-10V的电压,再经1.2倍放大后达到0-12V的电压范围,以控制电机的四相绕组,减少电路复杂性。
3.芯片能使用一组或两组电压供电,减少驱动电源的复杂性。使用外部参考电压,用高精度参考电压保证输出细分电压的稳定性。
4.“复位到零”干预,达到电机0-12V的电压控制范围,使电机在半步工作时能达到0-1.8°的步进范围。
5.利用双重缓冲的输入锁存结构和高速总线存取时间,四路DAC能分别写入和输出数据,并能同时一次性写出,达到高速并行输入和并行输出的数模转换要求。
6.芯片性价比方面的考虑。
3.驱动电路的设计
在驱动电路的设计中,把驱动电路分成四个部分:电源部分、单片机部分、D/A转换部分、放大驱动部分。
电源部分以数字电路和模拟电路分别供电的思想为纲,分为三组直流稳压电源:单片机电源+5V,电动机电源+15V,D/A及运放电源+/-15V。
在提供给D/A芯片外部参考电压时,使用高精度的10V参考电压电路,以保证细分的电压输出不出现漂移。
单片机部分以单片机(W77E58)为核心,集数据传输、控制为一体,实现自动控制功能。W77E58是一个与MCS-51系列兼容的8-bit CMOS微处理。其指令运行速度却是普通单片机的1.5-3倍/机器周期,时钟输入可上到40MHz。利用它输出12位数字量控制信号。
D/A转换部分用DAC8413芯片,把12位的数字量控制信号转换为四路模拟电压输出。 放大驱动部分用超低偏移电压放大器OP-07作一级电压放大,把D/A输出的10V模拟电压信号放大1.2倍,然后再加上一级以OP-07为器件的跟随器,达到步进电动机0-12V的工作电压要求。经放大的电压信号,直接送到功率场效应晶体管IRF540,以场效应管作为驱动管。并在每个线圈绕组上接上二极管抑制反向电动势,保护有关元件。
步进电机的选用:24BYG4022-1 DC12V 0.25A
注:本驱动电路图在附录上。
4.驱动程序的设计
步进电动机的半步工作时为1.8°,驱动程序的设计目的是编写一个4096级查正、余弦表功能的程序,产生大小正比于控制函数X的正、余弦函数的两路电压Va、Vb输出,作为电机A、B两相绕组电流的控制电压。并根据细分控制函数数学模型,编写四相电流控制驱动方式。
采用该数学模型时,四相电流一个周期的变化示意图如下:
程序的设计在步进电动机的细分软件技术上,实现了“电流矢量恒幅均匀旋转”的细分方法,从原理上解决了实现了高精度细分方法的技术问题。
对影响细分控制精度的非线性,通过细分控制修正表和相应的单片机修正程序对细分正﹑余弦表实施修正。
驱动程序中的正弦表为4096级,而步进角度一步要求为128级,上述程序中的查表步距为固定值,但实测中的实验数据和它的曲线表明,仍然未能达到步进角度线性变化的要求。针对这个问题,提出了在较高精度的数表中查表时,使用非固定查表步距代替原来的固定步距,从而达到修正细分控制精度非线性的问题。
注:本驱动程序和程序框图在附录上。
五.检验方案设计
由于椭偏仪的要求是步进电动机在一个步距上进行细分,也就是半步角度1.8°细分128份等于0.0140625°,以此设计了一套检查步进角度细分情况的系统。
让步进电动机带上一个半径为150mm长的转臂,并在转臂上用头发丝作刻度。然后,用分辨率为0.01mm的显微镜观察转臂末端上刻度的变化。
注:检验装置平面图在附录上。
因为,每次步进转过的角度距离为:
SIN(1.8°/128)*150mm=0.03682mm;
约等于步进转臂转过的弧长:
2*π*150/200/128=0.03680mm;
所以,能用分辨率为0.01mm的显微镜观察转臂步进角度刻度的变化,而且还可以在半步范围内用转过的角度距离近似代替转臂转过的弧长。
检测过程中,让步进电机每次只走一步,然后微调显微镜的细调刻度,用显微镜中十字刻度的垂直刻度对准转臂刻度的右侧,记录每次细调刻度的变化,就能得出反映步进电动机细分步进的角度变化数据,根据这些数据就能绘制出步进角度变化的曲线图。
另外,还通过步进电机的正反转实现电机重复性的检验,以及通过电机定点偏移的测量检验电路的稳定性问题,从而分析电路能否达到分辨率的要求。
根据理论推测试验曲线和理想曲线如下:
六.实验结果
根据以上检验系统,每次得出一组128个步进距离的长度数据,以及整理实验数据绘制出的步进电动机微步角度和距离关系曲线。
35YUANLI[1]_yuanli
注:实验数据和关系曲线图在附录上。
七. 七. 结论
本步进电动机高精度细分方法及其控制系统,具有以下突出特点:
1. 在步进电动机细分技术上,设计了“电流矢量恒幅均匀旋转”方法,从原理上解决了实现高精度细分的技术难题,达到了微步距角1.582″的国际领先水平。
2.设计了细分控制函数修正电路,及单片机修正程序,克服了步进电动机非线性的影响,保证了高精度细分的实现。
3.细分控制电路中,D/A转换器采用了高精度参考电压源,驱动电路的电压负反馈,确保了高精度细分的实现。
4.还可以编写一个计算机控制程序通过RS232接口,向单片机发送步进角度数据、控制数据和回读采集数据,以实现步进电机的计算机实时控制功能。具体程序由于时间的限制,该程序仍在考虑中。
本电路的实施,使步进电动机的细分技术提高到了超高精度细分的水平,为自动化控制、精瞄机床加工、高精度定位、自动测量、自动瞄准等众多的高新技术领域提供了一流水平的技术和产品。
八. 八. 结束语
在整个毕业论文设计过程中,我主要围绕着如何在步进电机最小步进角的基础上实现步进细分。从方案的制定到软件的编写我都经过反复的思考,并且查看了很多的参考书籍和参考资料,以及得到了指导老师的从旁指导和大力支持。
在本次毕业设计中,我进一步加强了自己的动手能力和运用专业知识的能力,从中学习到如何去思考和解决问题,以及如何灵活地改变方法去实现设计方案;特别是深刻体会到的是软件和硬件结合的重要性,以及两者的联系和配合作用。
通过毕业设计,我既巩固了专业知识,又学到了在设计高精密仪器过程中的许多流程和该注意的事项,增强了产品开发的意识,是我在大学时期很好的一次实践和锻炼机会。
附录
[1] 驱动电路图
[2] 驱动程序和程序框图
[3] 检验装置平面图
[4] [4] 实验数据和关系曲线图
参考文献
[1] 吕国雄、郑永驹编著 《MCS-51系列单片机微型计算机原理与应用基础教程》
广东高等教育出版社 1994.12
[2] 王建校等编著 《51系列及C51程序设计》 科学出版社 2002.4
[3] 雨宫好文 主编 松井信行 著 《控制用电机入门》 科学出版社 2000.1
[4] 高 鹏等编著 《Protel99 入门与提高》 人民邮电出版社 2000.2
[5] 清源计算机工作室编著 《Protel 99原理图与PCB设计》 机械工业出版社 2000
[6] 梁军等编 《单片机原理及应用》东南大学出版社 2000
[7] 何立民编著 《单片机高级教程》 北京航空航天大学出版社 2000
致 谢
感谢物理系电信工程系的郑永驹老师、杨怀老师、黄佐华老师和飞驰公司邓宏蛟同志的悉心指导和大力协助,也感谢物理系电信工程系在本科学习中给予我的良好教育和优越的学习环境。
本文标题:1-Anna_Sui (1)61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1