一 : 红外测距传感器的原理与设计最终版 72
红外测距传感器的原理与设计
摘要:现代科学技术的发展,进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。为了实现物体近距离、高精度的无线测量,我采用红外发射接收模块作为距离传感器,单片机作为处理器,编写A/D转换、显示以及与PC机的通信程序,开发了一套便推式的红外距离测量系统,系统可以高精度的实时显示所测的距离,并且可以将距离量通过串口发送到PC机显示处理、本系统结构简单可靠、体积小、测量精度高、方便使用,另外本系统形成了一套完善的软硬件开发平台,可以进行扩展、移植和做进一步的开发。
关键词:红外测距;68HC11E1;A/D转换;
目 录
一、绪论 .................................................................................................................................................. 1
1.1 设计背景 ..................................................................................................................................... 1
1.2 红外线简介 ................................................................................................................................. 1
1.3 红外线传感器概述 ..................................................................................................................... 2
1.3.1 红外线传感器系统介绍 .................................................................................................... 2
1.3.2 红外线传感器的分类 ........................................................................................................ 3
1.3.3 红外线传感器的应用 .......................................................................................................... 6
二、红外测距的方法和原理 .................................................................................................................. 7
2.1 几种红外测距原理及选择 .......................................................................................................... 7
2.1.1 相位测距原理 ...................................................................................................................... 7
2.1.2 PSD测距原理 ..................................................................................................................... 9
2.1.3 带运动机构的双象比较法原理 ........................................................................................ 9
2.1.4 时间差测距法原理 ............................................................................................................ 9
2.1.5 反射能量法原理 ................................................................................................................ 9
2.1.6 红外测距原理的选择 ........................................................................................................ 9
2.2 红外测距系统的工作原理 .......................................................................................................... 9
三、红外测距的基本结构及系统框图 ................................................................................................ 11
3.1红外测距的过程 ......................................................................................................................... 11
3.2 红外测距系统框图 .................................................................................................................... 11
3.3 主要元件分析 ............................................................................................................................ 12
3.3.1 红外线发射器件 ................................................................................................................ 12
3.3.2红外线光敏二极管 ............................................................................................................. 13
四、红外测距硬件电路设计 ................................................................................................................ 14
4.1 单片机最小系统 ....................................................................................................................... 14
4.2 红外发射电路设计 ................................................................................................................... 16
4.3 红外接收放大电路设计 ........................................................................................................... 17
4.4 电源电路 ................................................................................................................................... 19
4.5 数码管显示电路 ....................................................................................................................... 21
五、软件模块设计 ................................................................................................................................ 23
5.1 程序设计步骤 ........................................................................................................................... 23
5.2 软件设计框图: ....................................................................................................................... 23
5.3 红外测距A/D转换程序 ......................................................................................................... 24
六、测量精度分析 ................................................................................................................................ 26
[参考文献] ............................................................................................................................................ 27
附 录 .................................................................................................................................................... 28
致 谢 .................................................................................................................................................... 28
一、绪论
1.1 设计背景
在基础学科研究中,传感器具有突出的地位。现代科学技术的发展进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。其中激光测距是靠激光束照射在物体上反射回来的激光束探测物体的距离。由于受恶劣的天气、污染等因素影响,使反射的激光束在一定功率上探测距离比可能探测的最大距离减少一半左右,损失很大,影响探测的精确度;微波雷达测距技术为军事和某些工业开发采用的装备和振荡器等电路部分价格昂贵,现在几乎还没有开拓民用市场;超声波测距在国内外已有人做过研究,由于采用特殊专用元件使其价格高,难以推广;红外线作为一种特殊的光波,具有光波的基本物理传输特性—反射、折射、散射等,且由于其技术难度相对不太大,构成的测距系统成本低廉,性能优良,便于民用推广。红外线测距传感器有它的几个特点,远距离测量,在无反光板和反射率低的情况下能测量较远的距离;有同步输入端,可多个传感器同步测量; 测量范围广,响应时间短; 外形设计紧凑,易于安装,便于操作;所以它的应用价值比较高。另外红外测距的应用越来越普遍。在很多领域都可以用到红外测距仪。红外测距一般具有精确度和分辨率高、抗干扰能力强、体积小、重量轻等优点,因而应用领域广、行业需求众多,市场需求空间大。当前红外测距仪的发展趋势是向测量更安全、测量精度高、系统能耗小、体积小型化方向发展。
1.2 红外线简介
近二十年来,红外辐射技术已成为一门迅速发展的新兴技术科学,它已广泛应用于生产、科研、军事、医学等各个领域。红外辐射技术是发展测量技术、遥感技术和空间科学技术的重要手段。红外辐射俗称红外线,又称红外光,它是一种人眼看不见的光线,但实际上它和其他任何光线一样,也是一种客观存在的物质,任何物质只要它的湿度高于绝对零度,就有红外线向周围空间辐射。它的波长介于可见光和微波之间,它的波长范围大致在0.75μM-1000μM的频谱范围之内,红外线与可见光、紫外线、x射线、y射线和微波、无线电波一起构成了整
个无线连续的电磁波谱。在红外技术中,一般将红外辐射分为四个区域,即近红外区、中红外区、远红外区和极远红外区。它已在科技、国防和工农业生产等领域获得广泛的应用。
1.3 红外线传感器概述
1.3.1 红外线传感器系统介绍
1.待测目标
根据待侧目标的红外辐射特性可进行红外系统的设定。
2.大气衰减
待测目标的红外辐射通过地球大气层时,由于气体分子和各种气体以及各种溶胶粒的散射和吸收,将使得红外源发出的红外辐射发生衰减。
3.光学接收器
它接收目标的部分红外辐射并传输给红外传感器。相当于雷达天线,常用是物镜。
4.辐射调制器。
对来自待测目标的辐射调制成交变的辐射光,提供目标方位信息,并可滤除大面积的干扰信号。又称调制盘或斩波器,它具有多种结构。
5.红外探测器
这是红外系统的核心。它是将红外辐射能转换为电能的光敏器件,利用红外辐射与物质相互作用所呈现出来的物理效应探测红外辐射的传感器。多数情况下是利用这种相互作用所呈现出的电学效应。此类探测器可分为光子探测器和热敏感探测器两大类型。
6.探测器制冷器
由于某些探测器必须要在低温下工作,所以相应的系统必须有制冷设备。经过制冷,设备可以缩短响应时间,提高探测灵敏度。
7.信号处理系统。
将探测的信号进行放大、滤波,并从这些信号中提取出信息。然后将此类信息转化成为所需要的格式,最后输送到控制设备或者显示器中。
8.显示设备。
这是红外设备的终端设备。常用的显示器有示波器、显像管、红外感光材料、指示仪器和记录仪等。 依照上面的流程,红外系统就可以成相应的物理量完的测量。
红外系统的核心是红外探测器,按照探测的机理的不同,可以分为热探测器和光子探测器两大类。下面以热探测器为例子来分析探测器的原理。
热探测器是利用辐射热效应,使探测元件接收到辐射能后引起温度升高,进而使探测器有依赖于温度的变化而发生变化的性能。检测其中某一性能的变化,便可探测出辐射。多数情况下是通过热电变化来探测辐射的。当元件接收辐射,引起非电量的物理变化时,可以通过适当的变换后测量相应的电量变化。欧姆龙公司生产的漫反射式和对射式光电传感器,这两种传感器主要用于事件检测和物体定位。
红外传感器已经在现代化的生产实践中发挥着它的巨大作用,随着探测设备和其他部分的技术的提高,红外传感器能够拥有更多的性能和更好的灵敏度。
1.3.2 红外线传感器的分类
常见红外传感器可分为热传感器和光子传感器。
(1)热传感器
热传感器是利用入射红外辐射引起传感器的温度变化,进而使有关物理参数发生相应的变化,通过测量有关物理参数的变化来确定红外传感器所吸收的红外辐射。热探测器的主要优点是相应波段宽,可以在室温下工作,使用简单。但是,热传感器相应时间较长,灵敏度较低,一般用于低频调制的场合。
热传感器主要类型有:热敏传感器型,热电偶型,高莱气动型和热释放电型四种。
(a)热敏电阻型传感器
热敏电阻是由锰、镍、钴的氧化物混合后烧解而成的,热敏电阻一般制成薄片状,当红外辐射照射在热敏电阻上,其温度升高,电阻值减少。测量热敏电阻值变化的大小,即可得知入射的红外辐射的强弱,从而可以判断产生红外辐射物体的温度。
(b)热电偶型传感器
热电偶是由热电功率差别较大的两种材料构成。当红外辐射到这两种金属材
红外测距传感器的原理与设计最终版 72_红外线感应器原理
料构成的闭合回路的接点上时,该接点温度升高。而另一个没有被红外辐射辐照的接点处于较低的温度,此时,在闭合回路中将产生温差电流。同时回路中产生温差电势,温差电势的大小,反映了接点吸收红外辐射的强弱。利用温差电势现象制成的红外传感器称为热电偶型红外传感器,因其时间常数较大,相应时间较长,动态特性较差,调制频率应限制在10HZ以下。
(c)莱气动型传感器
高莱气动型传感器是利用气体吸收红外辐射后,温度升高,体积增大的特性,来反映红外辐射的强弱。它有一个气室,以一个小管道与一块柔性薄片相连。薄片的背向管道一面是反射镜。气室的前面附有吸收模,它是低热容量的薄膜。红外辐射通过窗口入射到吸收模上,吸收模将吸收的热能传给气体,使气体温度升高,气压增大,从而使柔镜移动。在室的另一边,一束可见光通过栅状光栏聚焦在柔镜上,经柔镜反射回来的栅状图像又经过栅状光栏投射到光电管上。当柔镜因压力变化而移动时,栅状图像与栅状光栏发生相对位移,使落到光电管上的光量发生改变,光电管的输出信号也发生变化,这个变化量就反映出入射红外辐射的强弱。这种传感器的特点是灵敏度高,性能稳定。但响应时间性长,结构复杂,强度较差,只适合于实验室内使用。
(d)热释电型传感器
热释电型传感器是一种具有极化现象的热晶体或称“铁电体”。铁电体的极化强度(单位面积上的电荷)与温度有关。当红外线辐射照射到已经极化的铁电体薄片表面上时,引起薄片温度升高,使其极化强度降低,表面电荷减少,这相当于释放一部分电荷,所以叫做热释电型传感器。如果将负载电阻与铁电体薄片相连,则负载电阻上便产生一个电信号输出。输出信号的大小,取决于薄片温度变化的快慢,从而反映入射的红外辐射的强弱。由此可见,热释电型红外传感器的电压响应率正比于入射辐射变化的速率。当恒定的红外辐射照射在热释电传感器上时,传感器没有电信号输出。只有铁电体温度处于变化过程中,才有电信号输出。所以,必须对红外辐射进行调制(或称斩光),使恒定的辐射变成交变辐射,不断的引起传感器的温度变化,才能导致热释电产生,并输出交变的信号。
(2)光子传感器
光子传感器是利用某些半导体材料在入射光的照射下,产生光子效应,使材料电学性质发生变化。通过测量电学性质的变化,可以知道红外辐射的强弱。利
用光子效应所制成的红外传感器。统称光子传感器。光子传感器的主要特点灵敏度高,响应速度快,具有较高的响应频率。但其一般须在低温下工作,探测波段较窄。
按照光子传感器的工作原理,一般可分为内光电和外光电传感器两种,后者又分为光电导传感器、光生伏特传感器和光磁电传感器等三种。
(a)外光电传感器
当光辐射在某些材料的表面上时,若入射光的光子能量足够大时,就能使材料的电子逸出表面,这种现象叫外光电效应或光电子发射效应。光电二极管、光电倍增管等便属于这种类型的电子传感器。它的响应速度比较快,一般只需几个毫微秒。但电子逸出需要较大的光子能量,只适宜于近红外辐射或可见光范围内使用。
(b)光电导传感器
当红外辐射照射在某些半导体材料表面上时,半导体材料中有些电子和空穴可以从原来不导电的束缚状态变为能导电的自由状态,使半导体的导电率增加,这种现象叫光电导现象。利用光电导现象制成的传感器称为光导传感器,如硫化铅、硒化铅、锑化铟、碲隔汞等材料都可制光电导传感器。使用光电导传感器时,需要制冷和加一定的偏压,否则会使响应率降低,噪声大,响应波段窄,以致使红外线传感器损坏。
(c)光生伏特传感器
当红外辐射照射在某些半导体材料的PN结上时,在结内电场的作用下,自由电子移向N区,如果PN结开路,则在PN结两端便产生一个附加电势,称为光生电动势。利用这个效应制成的传感器或PN结传感器。常用的材料为砷化铟、锑化铟、碲化汞、碲锡铅等几种。
(d)光磁电传感器
当红外辐射照射在某些半导体材料表面上时,半导体材料中有些电子和空穴将向内部扩散,在扩散中若受强磁场的作用,电子与空穴则各偏向一方,因而产生开路电压,这种现象称为光磁电效应。利用此效应制成的红外传感器,叫做光磁电传感器。
光磁电传感器不需致冷,响应波段可达7μM左右,时间常数小,响应速度快,不用加偏压,内阻极低,噪声小,有良好的稳定性和可靠性。但其灵敏度低,
低噪声前置放大器制作困难,因而影响了使用。
1.3.3 红外线传感器的应用
红外传感器的应用主要体现在以下几个方面:
1、红外辐射计:用于辐射和光谱辐射测量
2、搜索和跟踪系统:用于搜索和跟踪红外目标,确定其空间位置并对其运动进行跟踪。
3、热成像系统:能形成整个目标的红外辐射分布图像。
4、红外测距系统:实现物体间距离的测量。(利用的是红外线传播时的不扩散原理,因为红外线在穿越其它物质时折射率很小,所以长距离的测距仪都会考虑红外线)
5、通讯系统:红外线通信作为无线通信的一种方式。
6、混合系统:是指以上各类系统中的两个活多个组合。
二、红外测距的方法和原理
2.1 几种红外测距原理及选择
2.1.1 相位测距原理
由主控振荡器 (即主振)产生的调制信号频率f ,经放大后加到Ga As发光管,经电流调制出射红外调制光,从发射光学系统出射射向镜站的反光镜 ;经反射后,回光被接收光学系统所接收,到达硅光敏二极管 ;经过光电转换,得到高频的测距信号。为了提高相位测量的精度和仪器的稳定性,机内又设置了本机振荡器(本振),其频率为
'f ?f士f? 2-1
(f?为几个千赫的中频)。利用差频原理将高频测距信号与本振信号同时输入到混频 I,获得中频f?的测距信号e。但它保留着在测线上往返所形成的相位差??。与此同时,在混频I I中,本振与主振信号不经测线直接在机内会合,从而可以得到用于比相的中频基准信号 ( 参考信号) e。两者经过选频放大和整形后输入到检相器比相,得到相位差。最后通过运算和显示系统直接给出所测的距离值。由于受到机内光学和电子线路附加相移??的影响,事实上对测线上往返的光波所测得的结果,既包含了2S距离上的相位差,又有机内附加相移的部分,即
??外???2 s??? 2-2
相位式红外光电测距通常由砷化镓发光二极管为载波源,中心波长一般在0.72-0.94 μm,发出的红外线强度随注入的电信号强弱而变化。通过测量连续的调制光波在待测距离上往返后产生的相位移动量,来间接测定调制波传播的时间t,从而求得被测距离D。由A点测距仪发出连续的频率固定的调制信号(一般是调幅信号)沿着待测距离传播到B点,由B点的反射棱镜再返回到A点。则下图中所示的相位移,即代表调制波往返传播的距离2 D。
图1 调制波往返的传播距离
由图1
?=2?N????2?(N???/2?)=2?(N+?N) 2-3
即
D??(N??N)??/2(N??N) 2-4
式中,2π为一个周期的相位变化,N为相位移中的2π的整周期数,??为不足整周期相位移的尾数;?N为不足整周期的比例数(?N ???/2?? 1),λ为调制波长。由物理学可知??c/f,其中,c为调制波的传播速度,f为调制波频率。
因为 c和f为已知,故式2-4中的?/2是已知的单位长度,可把它称为“电尺”。从上式可知,相位式测距的一般原理可相当于用这样的“电尺”代替钢尺量距,被测距离就等于整尺段(?/2)N和余尺段 (?/2)?N之和。式2-4中,?/2为已知,而△N由仪器测得,但仍有两个未知数D和N。因此用一个测尺频率测距耐,便出现多值解要解决这个问题,从原理上讲,似乎只要把“电尺”长度选择得大于被测距离D,则式2-4变为D?(?/2)?N,从而可变多值解为唯一解了,
红外测距传感器的原理与设计最终版 72_红外线感应器原理
这显然是不可能的。一是“电尺”不能过于长,二是一定测相精度下,“电尺”越长,其误差越大,测距精度明显降低。
2.1.2 PSD测距原理
利用三角测距原理,用一种称之为位置敏感器件(Position Sensitive Device)的PSD元件来获得二路输出信号, 根据这二路信号来获得物体的距离量值。
2.1.3 带运动机构的双象比较法原理
系统中有二套光路对被测物体成像,其中一套光路是经过可运动的反光镜获得的,接收系统及时比较二套光路来的图像, 当二者一致时, 就可根据可运动反光镜的位置来获得物体的距离信息。
2.1.4 时间差测距法原理
红外线发射器发射出频率为40kHz的红外线,经障碍物反射,红外线接收器接收到反射波信号,并将其转变为电信号。测出发射波与接收到反射波的时间差t,即可求出距离s。
2.1.5 反射能量法原理
反射能量法:仪器发射一束光(通常是近红外光) 照射到被测物体表面,仪器同时接收被测物体的反射光能量, 根据接收到的反射光能量来判断被测物体的距离。
2.1.6 红外测距原理的选择
我们在红外测距系统就是采用反射能量法,因其结构简单、体积小、成本低,可以广泛应用于大批量生产的光机电综合产品,因此本文就此方法设计了一种红外测距系统。
2.2 红外测距系统的工作原理
本文设计基本原理是红外发射电路的红外发光二极管发出红外光,经障碍物反射后,由红外接收电路的光敏接收管接收前方物体反射光,据此判断前方是否
有障碍物。根据发射光的强弱可以判断物体的距离,由于接收管接收的光强随是随反射物体的距离变化而变化的,因而,距离近则反射光强,距离远则反射光弱。
因为红外线是介于可见光和微波之间的一种电磁波,因此,它不仅具有可见光直线传播、反射、折射等特性,还具有微波的某些特性,如较强的穿透能力和能贯穿某些不透明物质等。红外传感器包括红外发射器件和红外接收器件。自然界的所有物体只要温度高于绝对零度都会辐射红外线,因而,红外传感器须具有更强的发射和接收能力。
三、红外测距的基本结构及系统框图
3.1红外测距的过程
红外测距的工作过程简单来讲就是瞄准目标,然后接通电源,启动发射电路,通过发射系统,像目标发射红外信号,同时,采样器采样发射信号,作为计数器开门的脉冲信号,启动计数器,时钟振荡器像计数器有效的输入计数脉冲,由目标反射回来的红外线回波作用在光电探测器上,转变为电脉冲信号,经过放大器放大,进入计数器,作为计数器的关门信号,计数器停止计数,计数器从开门到关门期间,所进入的时钟脉冲个数,经过运算得到目标距离,测距公式为:
L?Ct
2 3-1
式中:L——待测距离;
c——光速;
t——光脉冲在待测距离上往返传输所需要的时间。
只要求出光脉冲在待测距离往返传输所需要的时间就可以通过上式求出目标距离。红外脉冲的原理与结构比较简单、测距远、功耗小。
3.2 红外测距系统框图
本设计主要由五部分组成:红外发射电路、红外接收电路、放大电路、单片机电路、译码显示电路。其工作过程图2:
图2 红外测距系统工作过程
系统工作时,由发射单元发出一束激光,到达待测目标物后漫反射回来,经接收单元接收、放大整形后到距离计算单元计算完毕后显示目标物距离。
3.3 主要元件分析
3.3.1 红外线发射器件
红外线发射器件是最长用的为红外发光二极管,它与普通发光二极管的结构 原理以及制作工艺基本相同,是只有一个PN结的半导体器件,只是所有的材料不同,制造红外发光二极管砷化钾,砷铝钾等,其中应用最多的是砷化钾。
红外发光二极管一般采用环氧树脂,玻璃,塑料等封装,除白色透明材料封装外,还可见到用蓝色透明材料封装的,。红外发光二极管按发光功率的大小,可分为小功率,中功率,大功率三种。另外,红外发光二极管除顶面发光型外,还有侧面发光型。小功率管一般采用全塑封装,也有部分是采用陶瓷底座,顶端用玻璃或环氧树脂透镜封装的,中大功率管一般采用带螺纹金属底座,以便安装散热片。随着发光功率得提高,相应体积的管子也增大。
红外发光二极管的主要参数
(1)正向工作电流I
是指红外发光二极管长期工作时,允许通过的最大平均电流,因为电流通过PN结时,要消耗一定的功率而引起管子发热,如管子长期超过I运行,会因过热而烧毁,因此,使用的最大平均正向工作电流不得超过I。
(2)光功率?
是指输入到发光二极管的电功率转化为光输出功率的那一部分。光功率越大,发射距离越远。
(3)峰值波长?p
是指红外发光二极管所发出近红外光中,光强最大值所对应的发光波长,在选用红外接收管时,其受光峰值波长应尽量靠近?p。
(4)反向漏电流?r
是指管子未被反向击穿时反向电流的大小,希望它越小越好。
(5)响应时间t0
由于红外发光二极管PN结电容的存在,影响了它的工作频率。现在,红外发光二极管的相应时间一般为10?6S~10?7S最高工作频率为几十???。
3.3.2红外线光敏二极管
我们知道半导体具有光电效应,即用光照半导体,可使半导体的电阻率发生变化。利用半导体的光电效应可以制成光电二极管,不同的半导体材料对不同波长的入射光的响应是不同的。
光敏二极管有顶面受光和侧面受光两种形式。它也是采用塑料、玻璃、环氧树脂等材料封装。
光敏二极管的主要参数
(1)光电流IL
是指在一定反向电压下,入射光强为某一定值时流过管子的电流。光敏二极管的光电流一般为几十μA,并与入射光强成正比。
(2)暗电流ID
是指在一定反向电压下,无光照时流过管子的电流。一般在50V反压下,ID小于0.1μA。
(3)反向工作电压UR
是指在无光照时,光敏二极管反向电流小于0.2μA-0.3μA时,允许的最高反向工作电压,一般在10V左右,最高可达几十伏。
红外测距传感器的原理与设计最终版 72_红外线感应器原理
四、红外测距硬件电路设计
4.1 单片机最小系统
M68HC11系列是motorola公司生产的8位单片机中功能最强、集成功能最全的机种。68HC11E1的一大特色是功耗低,工作电流小于15mA,有WAIT 和STOP 两种方式进行省电。M68HC11的可靠性很高,有程序自下载功能,接上串口线就可以自动下载程序。其扩展能力强。
68HC11E1由CPU、片内存储器、定时器系统、串行口、A/D、并行I/O口,中断和复位系统组成。封装如图3:
图3 M68HC11的封装图
该芯片扩展了32K的静态不挥发RAM。片内EEPROM可现场擦除和写入,可存放各种需经常修改、掉电后又不允许丢失的数据,也可存放程序。片内RAM具有后备保护特性。其优点是既有静态RAM的速度和方便(70ns),又有EEPROM或FlashRom的掉电不丢失性,从而能将程序和数据合用一个芯片。同时具有可
靠的上电、掉电、强静电等数据保护功能。
其控制板设计了ASBUS总线如图4:
图4 ASBUS总线图
简单类似于ISA和PCI总线。采用堆叠式的ASBUS扩展卡可以方便扩展控制板的功能。 总线通常包含了几十条分立的线,每一条被赋予一个特定的含义或功能。
总线可以分成三个功能组:
数据线:数据线提供系统模块间传送数据的路径。这些线结合在一起称为数据总线。线的数目称为数据总线的宽度。
地址线:地址线用于指定数据线上数据的来源和去向。地址线的宽度决定了系统能够使用的最大的存储器容量。
控制线:控制线用来控制对数据地址线的访问和使用。由于数据线和地址,所有模块共享,因此必须用一种方法来控制他们的使用。
【特性引脚功能】
ASBUSA 和 ASBUSB 分别有 14 个信号线。
PCO-PC7:数据总线
RESET: 复位信号
IRQ: 外部中断输入脚
VCC: +5V 电源(负载不要超过 300MA)
Vmotor: 电机电压,也即电池电压,可接较大负载
GND: 地
IS0-IS3:输入选择线 0-3
OS0-0S3:输出选择线 0-3
PA1-PA2:输入捕捉口
PA3: 输出比较口
PE5-PE7:模拟输入口
本设计中PE5扩展红外接收传感器。
4.2 红外发射电路设计
(a)电路组成:红外发射驱动电路是由一个简单的共射放大电路和一个作为开关的三极管电路组成的模块。电路原理如图5所示
:
图5 红外发射电路
(b)电路工作原理:在共射放大电路中,红外发光二极管TLN205接于共射放大电路的集电极,与基极和发射极相接的二极管起温度补偿作用。控制管脚Vin与68HC11E1芯片管脚Vcc相接。当控制管脚Vin有信号输入时,控制电路的三极管导通,同时整个电路导通,红外发光二极管TLN205发射出红外光。
4.3 红外接收放大电路设计
图6 红外接收放大电路
(a)电路组成:红外接收驱动电路是由红外接收管TPS708和两个电压串联负反馈模拟运算放大电路组成的模块. 红外接收驱动电路设计为两极放大是因为在许多情况下,输入信号是很微弱的,要把这样微弱的信号放大到足以带动负载,仅用一级电路放大定是做不到的,必须经多级放大,以满足放大倍数和其他性能方面的要求。
(b)电路工作原理:红外发光管TLN205发射出的红外光,在遇到前面的障碍物反射后,由红外接收管TPS708接收,此时TPS708会产生一个与光强相对应的电流。电流经由LM358 两级放大后,在输出端可以得到一个0~3V的模拟电压,作68HC11E1 单片机模拟输入量进行A/D转换,最后将转换结果在LED上显示出来。
(c)运算放大电路定量分析:我们采用负反馈模拟运算放大电路,是因为负反馈具有提高增益稳定性、展宽放大器通频带与减少非线性失真和噪音三大优点,并且负反馈还有对相应的输出量进行自动调节作用。根据闭环增益方程求?f对?的导数,得 d?f.
...?1(1??F)2 ..
d?
4-1
即微分 d?f?
闭环增益的相对变化量为 d?f..d?(1??F)2 4-2 ...
?f.?1(1??F)..?d?f?..
4-3
式4-3表明,负反馈的引入使放大器的放大倍数稳定性提高到了(1??F)倍,而且负反馈越深,稳定性越高。 ..
输入信号加在集成运放同相输入断的电路称为同相比例运算电路,在红外接收驱动电路中就采用同相比例运算进行两级放大。下面对同相比例运算电路进行定量分析:
u??u??uI 4-4
i??i??0 4-5
iI?IF 4-6
iF?
而 u??u0uI?u0?RFRF 4-7 u?u??I 4-8 R1R1 iI??
uI?u0u??I
R1 4-9 所以 RF
u0?(1?
整理得 RF)uIR1 4-10 式子表明,输出电压与输入电压uI之间存在着比例运算关系,比例系数由RF与R1的值决定。与集成运放本身的参数无关。
因为输入端通过集成运放的输入电阻接地,故同相比例运算电路的输入电阻很大,R1的大小对信号源影响不大,但如果太小,当RF很小时,会影响
红外测距传感器的原理与设计最终版 72_红外线感应器原理
输出电压。
若要获得闭环电压放大倍数,由电压放大倍数定义可得:
?uf?
若 RF?0 则 u0?uI
u0R?1?FuIR1 4-11
即输出电压与输入电压相等,相位相同,此时同相比例运算电路称为电压跟随器。 4.4 电源电路
电路组成:该稳压电源由变压电路、整流电路、滤波电路、和稳压电路四大部分组成。如图7所示:
图7 电源电路图
电路工作原理:该电路为交直转换电源电路,首先,由变压器将市电220V交流电变成9V的交流电,再经单相桥式整流电路将交流电变为所需要的直流电,后再经滤波电路、7805稳压器把不稳定的直流电压变为稳定的直流5V电压输出,供整个红外测距模块使用。 各部分的工作原理: 1. 单相桥式整流电路
a) 桥式整流电路如图7所示,4个整流二极管组成一个电桥,变压器的
次级和电容C5分别接到电桥的两个对角线的两端, b) 桥式整流工作原理
当变压器的次级处于正半周期时,二极管VD1、VD3导通,VD2、VD4截止,当变压器的次级处于负半周期时,二极管VD2、VD4导通,截止VD1、VD3,R1上所加电压为U0,经整流后,电流由交流电变为直流电。 以上分析可知,桥式整流电路的整流平均值比半波整流时增加1倍,即
U??2?0.45U2?0.9U2 4-12
通过负载电阻的直流也增加1倍,即
I0?
U0U
?0.92 4-13 RLR1
因为每两个二极管串联轮换半个周期,因此,每个二极管中流过的平均电流只有负载电流的一半,即
IVD?
整流二极管承受的最大反向电压
UBRM?2U2 4-15 因为单相桥式整流电路在变压器次级电压相同情况下,输出电压平均值高, 脉动系数小,虽然二极管用了4个,但小功率二极管体积小,价格低廉,因此全 波桥式整流得到广泛应用。
2. 滤波电路
a) 整流输出的电压是一个单方向脉动电压,虽然是直流,但脉动较大,
为了得到平滑的直流电压波形,必须采用滤波电路,以改善输出电压的脉动性,常用的滤波电路有电容滤波、电感滤波、复式滤波等,此处采用电容滤波。
b) 单相半波整流电容滤波电路如图所示,由于电容两端电压不能突变,
因而负载两端的电压也不会突变,使输出电压得以平滑,达到滤波目的。 3. 7805稳压电路
a) 通过整流滤波电路所获得的直流电源电压是比较稳定的,当电网电压波动或负载电流变化时,输出电压会随之改变。电子设备一般都需要稳定的电源电压。如果电源电压不稳定会引起直流放大器的零点漂移、
U1
I0?0.450 4-14 2RL
交流燥声增大、测量仪表的测量精度降低等。因此,必须进行稳压,目前,中小功率设备中广泛采用的稳压电源有并联型稳压电源、串联型稳压电源、集成稳压电路及开关型稳压电路。在此电路中我们采用集成稳压器7805
b) 7805稳压电路如图8所示
:
图8 7805集成稳压电路
型号7805稳压器中,78表示输出为正电压值,05表示输出电压的稳定值。输入端电容C3用来减小输入电压中的波纹。输出端电容C4用来改善瞬态负载响应特性。因为要求输出电压为5V,所以选择7805集成稳压器。
4.5 数码管显示电路
图9 数码管显示电路图
(a)电路组成:LED动态显示电路如图9所示,ASBUSA的数据输出口PC0~PC7与74LS373的数据输入口D0~D7连接,74LS373输出的高四位Q4~Q7经 74LS247译码与DS2相连,低四位Q0~Q3经74LS247译码与DS1相连,两个LED可显示10~80的距离值。
(b)电路工作原理: ASBUSA的数据输出口PC0~PC7输出距离的BCD码,经74LS373锁存后,高四位Q4~Q7经74LS247译码为相应的断码由七段码显示管显示十位数,低四位Q0~Q3经74LS247译码为相应的断码由七段码显示管显示个位数,因此距离可由两个LED显示管显示出来。
五、软件模块设计
5.1 程序设计步骤
在系统硬件已经确定的情况下,程序设计为:
① 分析问题:熟悉和明确问题的要求、已知条件及对运算控制的要求,准 确地规定程序将要完成的任务。
② 确定算法:根据设计问题的要求和指令系统特点,选择解决问题的方法。 ③ 设计程序流程图:直观、清晰地体现程序的设计思想。 ④ 分配内存单元:确定程序和数据区的起始地址。 ⑤ 编写源程序:根据流程图和指令系统编写源程序。
⑥ 调试源程序:先将源程序通过汇编生成目标文件,并消除语法错误,然 后在用户板上调试,达到预定要求。 5.2 软件设计框图:
图10 软件设计框图
当68HC11E1单片机接收到红外接收电路传输的电压信号后,经A/D转换程序,将片外的模拟信号转换为单片机可识别的数字信号,并经电压—距离转换子程序,将变化的电压转换为距离。最后,在LED显示器上显示出来。
红外测距传感器的原理与设计最终版 72_红外线感应器原理
5.3 红外测距A/D转换程序 /*红外测距,-1表示超出测量范围*/
int data[15]={129,93,69,56,49,42,37,34,31,29,27,26,25,23,21}; distance[15]={10,15,20,25,30,35,40,45,50,55,60,65,70,75,80} void main() {
int iIr=0; dis=0.0; while(1) {
iIr=analogport(5); dis=GetDistance(iIr); write(OX4000,dis); printf(“%d\n”,dis) wait(0.5) } }
int GetDistance(int iIr); {
int i ret;
if(iIr>data[0]︱︳iIr<data[14]) ret=-1; else {
for(i=0;i<15;i++) {
if(iIr==data[i]) {
ret=distance[i]; break;
}
else if(iIr>data[i]) {
ret=(iIr-data[i-1])*(distance[i]-distance[i-1])/(data[i]-data[i-1])+distance[i-1] break; } } }
return ret; }
六、测量精度分析
红外传感器由发送器和接收器两部分组成,在发送器和接收器之间有一定的有限视场。传感器只能检测到那些位于发射器视场和接收器视场的交叉区域内的障碍物,因此,单个的红外接近觉传感器不可避免地存在多个盲区。
大部分红外接收器在检测区域内有障碍物时输出低电压信号,反之输出高压信号。某些类型的物体有可能误导红外接收器,其中包括表面发亮的物体,光线吸收能力强的物体以及那些交叉部分太小以至于不能将足够的红外线从发送器反射至接收器的物体。
如果采用多个红外发送器和接收器就可以减少盲区的数量。由于发送器和接收器的价格都非常低,因此采用多套红外传感器是完全可行的。然而,无论实现过程如何完美,系统性能总会受到环境的影响。表面暗淡,光亮或者体积较小的物体都会经常使接收器产生漏报错误;如果阳光或者其他较强的光线照射在接收器上,有可能会使内部器件处于饱和状态,从而也会导致传感器发生漏报情况。
通常情况下,红外传感器很少产生误报错误。在系统正常情况下,所出现的误报错误通常来源于其他一些意想不到的红外噪声信号。例如:日光灯。原则上来讲,接收器无法判断其输出信息是否可靠;然而,如果接收器输出的障碍存在信号持续时间过短,完全可以认为这是噪声假信号造成的。
[参考文献]
[1] 王琳,多传感器信息融合技术及其应用[D].保定:华北电力大学硕士学位论文, 2002. [2] 冯华君.反射能量法测距对焦系统及其重叠设计法[J].光电工程,1998,25(2):48-53. [3] Geng Z J. Rainbow 3 dimensional camera:new concept of high-speed three-dimensional vision sys-tems [J].Opt.Eng,1996,35(2):376-383.
[4] 翟翌立,戴逸松.多传感器数据自适应加权融合估计算法的研究[J].计量学报,1998,19(1):69-74.
[5] 史军,雷正红. 数字频率计的设计[J]. 河西学院学报.第21卷第5期(2005) [6] 谭文秀. 数字频率计电路的设计与分析[J]. 测试技术.
[7] 曾光,冯锐. 基于FPGA的数字频率计VHDL软件实现方法[J]. 软件导刊. 第8卷第2 期. 2009年2月
[8] 程源,祝洪峰. 基于FPGA的数字频率计的设计与制作[J]. 制作天地 [9] 邓兴成.单片机原理与实践指导.机械工业出版社,2010 [10] 高. 红外测距方法[J]. 红外. 2004(07)
[11] 宋轶群,杜华生,董二宝. 基于PIC16F877的红外测距系统[J]. 仪表技术. 2004(05) [12] Comprehensive Research Group of the Topographic Survey Party. 红外高程导线测量精度的探讨[J]. 陕西地质. 1983(02)
[13] 何希才 薛永毅编著《传感器及其应用实例》 [M].机械工业出版社 2001 [14] 斌实,秉礼. 红外测距仪的原理及其应用[J]. 红外. 2003(03)
[15] 宋轶群,杜华生,董二宝.基于PIC16F877的红外测距系统[J].仪表技术,2004,(05). [16] 韦 伟, 周凌翱, 刘 青 一种便携式的红外测距系统 江苏 南京 210049
附 录
硬件电路框图:
致 谢
四年的读书生活在这个季节即将划上一个句号,而于我的人生却只是一个逗
号,我将面对又一次征程的开始。四年的求学生涯在师长、亲友的大力支持下,走得辛苦却也收获满囊,在论文即将付梓之际,思绪万千,心情久久不能平静。 伟人、名人为我所崇拜,可是我更急切地要把我的敬意和赞美献给一位平凡的人,我的论文导师陈传亮老师。我不是您最出色的学生,而您却是我最尊敬的老师。您教学严谨,学识渊博,思想深邃,视野雄阔,为我营造了一种良好的精神氛围。授人以鱼不如授人以渔,置身其间,耳濡目染,潜移默化,使我不仅接受了全新的思想观念,树立了宏伟的学术目标,领会了基本的思考方式,从论文题目的选定到论文写作的指导,经由您悉心的点拨,再经思考后的领悟,常常让我有“山重
红外测距传感器的原理与设计最终版 72_红外线感应器原理
水复疑无路,柳暗花明又一村”。感谢您对我悉心的辅导。
在论文即将完成之际,我的心情无法平静,从开始进入课题到论文的顺利完成,有多少可敬的师长、同学、朋友给了我无言的帮助,在这里请接受我诚挚谢意!
同时也感谢学院为我提供良好的做毕业设计的环境。
最后再一次感谢所有在毕业设计中曾经帮助过我的良师益友以及在设计中被我引用或参考的论著的作者。
第 29 页
二 : 超声波传感器测距原理
基于单片机的超声波测距仪设计
一、超声波测距原理
超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为v ,而根据计时器记录的测出发射和接收回波的时间差△t ,就可以计算出发射点距障碍物的距离S ,即:
S = v·△t /2 ①
这就是所谓的时间差测距法。
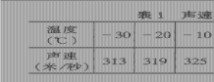
由于超声波也是一种声波, 其声速C与温度有关,表1列出了几种不同温度下的声速。在使用时,如果温度变化不大, 则可认为声速是基本不变的。常温下超声波的传播速度是334 米/秒,但其传播速度V 易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 ℃, 声速增加约0. 6 米/ 秒。如果测距精度要求很高, 则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。已知现场环境温度T 时, 超声波传播速度V 的计算公式为:
V = 331.45 + 0.607T ②
声
速
确
定
后,
只
要测得超声波往返的时间,即可求得距离。这就是超声波测距仪的机理。
二、系统硬件电路设计
第 1 页 共12 页
基于单片机的超声波测距仪设计
图2 超声波测距仪系统框图
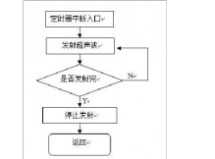
基于单片机的超声波测距仪框图如图2所示。该系统由单片机定时器产生40KHZ的频率信号、超声波传感器、接收处理电路和显示电路等构成。单片机是整个系统的核心部件,它协调和控制各部分电路的工作。工作过程:开机,单片机复位,然后控制程序使单片机输出载波为40kHz的10个脉冲信号加到超声波传感器上,使超声波发射器发射超声波。当第一个超声波脉冲群发射结束后,单片机片内计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数,这样就得到了从发射到接收的时间差△t;根据公式①、②计算出被测距离,由显示装置显示出来。下面分别介绍各部分电路:
1 、超声波发射电路
超声波发射电路如图3所示,89C51通过外部引脚P1.0 输出脉冲宽度为250μs , 40kHz的10个脉冲串通过超声波驱动电路以推挽方式加到超声波传感器而发射出超声波。由于超声波的传播距离与它的振幅成正比,为了使测距范围足够远,可对振荡信号进行功率放大后再加在超声波传感器上。
图3中T为超声波传感器,是超声波测距系统中的重要器件。利用逆压电效应将加在其上的电信号转换为超声机械波向外辐射; 利用压电效应可以将作用在它上面的机械振动转换为相应的电信号, 从而起到能量转换的作用。市售的超声
第 2 页 共12 页

超声波接收及信号处理电路是此系统设计和调试的一个难点。超声波接收器
接收反射的超声波转换为40KHz毫伏级的电压信号,需要经过放大、处理、用于触
第 3 页 共12 页
基于单片机的超声波测距仪设计
发单片机中断INT0。一方面传感器输出信号微弱,同时根据反射条件不同信号大小变化较大,需要放大倍数大约为100到5000倍,另一方面传感器输出阻抗较大,这就需要高输入阻抗的多级放大电路,这就会引入两个问题:高输入阻抗容易接收干扰信号,同时多级放大电路容易自激振荡。参考各种资料最后选用了SONY公司的专用集成前置放大器CX20106达到了比较好的效果。
CX20106由:前置放大器、限幅放大器、带通滤波器、检波器、积分器、整型电路组成。其中的前置放大器具有自动增益控制功能,可以保证在超声波传感器接收较远反射信号输出微弱电压时放大器有较高的增益,在近距离输入信号强时放大器不会过载。其带通滤波器中心频率可由芯片脚5的外接电阻调节。其主要指标:单电源5V供电,电压增益77 - 79DB , 输入阻抗27 KΩ , 滤波器中心频率30 K- 60 KHz。功能可描述为: 在接收到与滤波器中心频率相符的信号时,其输出脚7脚输出低电平。芯片中的带通滤波器、积分器等使得它抗干扰能力很强。
CX20106采用8脚单列直插式塑料封装,内部结构框图如图4。超声波接收器能将接受到的发射电路所发射的红外光信号转换成数十伏至数百伏的电信号,送到CX20106的①脚,CX20106的总放大增益约为80dB,以确保其⑦脚输出的控制脉冲序列信号幅度在3.5~5V 范内。总增益大小由②脚外接的R1、C1决定,R1越小或C1越大,增益越高。C1取值过大时将造成频率响应变差,通常取为1uf。C2为检波电容,一般取3.3uf。CX20106 采用峰值检波方式,当C2容量较大时将变成平均值检波,瞬态响应灵敏度会变低,C2较小时虽然仍为峰值检波,且瞬态响应灵敏度很高,但检波输出脉冲宽度会发生较大变动,容易造成解调出错而产生误操作。R2为带通滤波器中心频率f0的外部电阻,改变R2阻值,可改变载波信号的接受频率,当f0偏离载波频率时,放大增益会显著下降,C3为积分电容,一般取330pf,取值过大,虽然可使抗干扰能力增强,但也会使输出编码脉冲的低电平持续时间增长,造成遥控距离变短。⑦脚为输出端,CX20106 处理后的脉冲信号由⑦脚输出给单片机处理从而获得显示输出。
第 4 页 共12 页
基于单片机的超声波测距仪设计
图4 CX20106内部结构框图
本系统中应用的接收电路见图5 , 当89C51的P1.7为高电平时三级管V1导通,+5V电源通过继电器线圈和V1的发射结到地,使继电器K1接通,R2和R3并联组成5Ω电阻通过C1组成RC电路,控制红外接收专用集成电路CX20106的增益,使其7脚输出一定幅度的电压信号到89C51的P0.2口以触发中断。另外该芯片价格在三到五元,非常节省系统成本。

图5 超声波接收电路
3、距离显示电路
第 5 页 共12 页

基于单片机的超声波测距仪设计
图6 显示电路
超声波显示电路如图6所示。是利用单片机的串行输出。只用单片机的TXD,RXD端即可显示数字。
三、软件程序设计
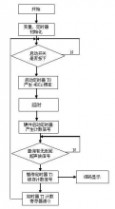
本系统采用模块化设计,由主程序、发射子程序、接收子程序、定时子程序、显示子程序等模块组成,图8为程序流程图。该系统的主程序处于键控循环工作方式,当按下测量键时,主程序开始调用发射子程序、查询接收子程序、定时子程序,并把测量结果用显示子程序在数码显示器上显示出来。
第 6 页 共12 页

基于单片机的超声波测距仪设计
图8 软件程序框图
定时器中断子程序
第 7 页 共12 页
基于单片机的超声波测距仪设计
外部中断服务子程序
四、具体程序
#include<reg51.h>
#include<math.h>
/*定义数据类型*/
#define uint unsigned int
#define uchar unsigned char
/*定义系统常数*/
long int time; /* 时间 */
bit CLflag; /* 测量标志 */
char cshu; /* 串数 */
#define T12us (256-12) /*定时器设初值 T=(256-T12us)*12/12MHZ /*定义功能位,串口用于显示 */
sbit VOLCK=P1.0; /* 发射 */
sbit MING=P3.2; /* 外部中断0检测接收信号 */
char idata disp[9]; /* 显示数据 */
char idata number[9]; /* 显示数据 */
char code table[] ={0x03,0x9f,0x25,0x0d,0x99,0x49,0x41,0x1f,0x01,0x09}; /* 码表

0,1,2,3,4,5,6,7,8,9 */
第 8 页 共12 页 */
三 : 超声波传感器测距原理
基于单片机的超声波测距仪设计
一、超声波测距原理
超声波测距原理是通过超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播时碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。(www.61k.com)超声波在空气中的传播速度为v ,而根据计时器记录的测出发射和接收回波的时间差△t ,就可以计算出发射点距障碍物的距离S ,即:
S = v·△t /2 ①
这就是所谓的时间差测距法。
由于超声波也是一种声波, 其声速C与温度有关,表1列出了几种不同温度下的声速。在使用时,如果温度变化不大, 则可认为声速是基本不变的。常温下超声波的传播速度是334 米/秒,但其传播速度V 易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 ℃, 声速增加约0. 6 米/ 秒。如果测距精度要求很高, 则应通过温度补偿的方法加以校正(本系统正是采用了温度补偿的方法)。已知现场环境温度T 时, 超声波传播速度V 的计算公式为:
V = 331.45 + 0.607T ②
声
速
确
定
后,
只
要测得超声波往返的时间,即可求得距离。这就是超声波测距仪的机理。
二、系统硬件电路设计
第 1 页 共12 页
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
图2 超声波测距仪系统框图
基于单片机的超声波测距仪框图如图2所示。(www.61k.com]该系统由单片机定时器产生40KHZ的频率信号、超声波传感器、接收处理电路和显示电路等构成。单片机是整个系统的核心部件,它协调和控制各部分电路的工作。工作过程:开机,单片机复位,然后控制程序使单片机输出载波为40kHz的10个脉冲信号加到超声波传感器上,使超声波发射器发射超声波。当第一个超声波脉冲群发射结束后,单片机片内计数器开始计数,在检测到第一个回波脉冲的瞬间,计数器停止计数,这样就得到了从发射到接收的时间差△t;根据公式①、②计算出被测距离,由显示装置显示出来。下面分别介绍各部分电路:
1 、超声波发射电路
超声波发射电路如图3所示,89C51通过外部引脚P1.0 输出脉冲宽度为250μs , 40kHz的10个脉冲串通过超声波驱动电路以推挽方式加到超声波传感器而发射出超声波。由于超声波的传播距离与它的振幅成正比,为了使测距范围足够远,可对振荡信号进行功率放大后再加在超声波传感器上。
图3中T为超声波传感器,是超声波测距系统中的重要器件。利用逆压电效应将加在其上的电信号转换为超声机械波向外辐射; 利用压电效应可以将作用在它上面的机械振动转换为相应的电信号, 从而起到能量转换的作用。市售的超声
第 2 页 共12 页
超声波测距原理 超声波传感器测距原理
超声波接收及信号处理电路是此系统设计和调试的一个难点。(www.61k.com)超声波接收器
接收反射的超声波转换为40KHz毫伏级的电压信号,需要经过放大、处理、用于触
第 3 页 共12 页
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
发单片机中断INT0。(www.61k.com]一方面传感器输出信号微弱,同时根据反射条件不同信号大小变化较大,需要放大倍数大约为100到5000倍,另一方面传感器输出阻抗较大,这就需要高输入阻抗的多级放大电路,这就会引入两个问题:高输入阻抗容易接收干扰信号,同时多级放大电路容易自激振荡。参考各种资料最后选用了SONY公司的专用集成前置放大器CX20106达到了比较好的效果。
CX20106由:前置放大器、限幅放大器、带通滤波器、检波器、积分器、整型电路组成。其中的前置放大器具有自动增益控制功能,可以保证在超声波传感器接收较远反射信号输出微弱电压时放大器有较高的增益,在近距离输入信号强时放大器不会过载。其带通滤波器中心频率可由芯片脚5的外接电阻调节。其主要指标:单电源5V供电,电压增益77 - 79DB , 输入阻抗27 KΩ , 滤波器中心频率30 K- 60 KHz。功能可描述为: 在接收到与滤波器中心频率相符的信号时,其输出脚7脚输出低电平。芯片中的带通滤波器、积分器等使得它抗干扰能力很强。
CX20106采用8脚单列直插式塑料封装,内部结构框图如图4。超声波接收器能将接受到的发射电路所发射的红外光信号转换成数十伏至数百伏的电信号,送到CX20106的①脚,CX20106的总放大增益约为80dB,以确保其⑦脚输出的控制脉冲序列信号幅度在3.5~5V 范内。总增益大小由②脚外接的R1、C1决定,R1越小或C1越大,增益越高。C1取值过大时将造成频率响应变差,通常取为1uf。C2为检波电容,一般取3.3uf。CX20106 采用峰值检波方式,当C2容量较大时将变成平均值检波,瞬态响应灵敏度会变低,C2较小时虽然仍为峰值检波,且瞬态响应灵敏度很高,但检波输出脉冲宽度会发生较大变动,容易造成解调出错而产生误操作。R2为带通滤波器中心频率f0的外部电阻,改变R2阻值,可改变载波信号的接受频率,当f0偏离载波频率时,放大增益会显著下降,C3为积分电容,一般取330pf,取值过大,虽然可使抗干扰能力增强,但也会使输出编码脉冲的低电平持续时间增长,造成遥控距离变短。⑦脚为输出端,CX20106 处理后的脉冲信号由⑦脚输出给单片机处理从而获得显示输出。
第 4 页 共12 页
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
图4 CX20106内部结构框图
本系统中应用的接收电路见图5 , 当89C51的P1.7为高电平时三级管V1导通,+5V电源通过继电器线圈和V1的发射结到地,使继电器K1接通,R2和R3并联组成5Ω电阻通过C1组成RC电路,控制红外接收专用集成电路CX20106的增益,使其7脚输出一定幅度的电压信号到89C51的P0.2口以触发中断。(www.61k.com)另外该芯片价格在三到五元,非常节省系统成本。
图5 超声波接收电路
3、距离显示电路
第 5 页 共12 页
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
图6 显示电路
超声波显示电路如图6所示。(www.61k.com)是利用单片机的串行输出。只用单片机的TXD,RXD端即可显示数字。
三、软件程序设计
本系统采用模块化设计,由主程序、发射子程序、接收子程序、定时子程序、显示子程序等模块组成,图8为程序流程图。该系统的主程序处于键控循环工作方式,当按下测量键时,主程序开始调用发射子程序、查询接收子程序、定时子程序,并把测量结果用显示子程序在数码显示器上显示出来。
第 6 页 共12 页
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
图8 软件程序框图
定时器中断子程序
第 7 页 共12 页
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
外部中断服务子程序
四、具体程序
#include<reg51.h>
#include<math.h>
/*定义数据类型*/
#define uint unsigned int
#define uchar unsigned char
/*定义系统常数*/
long int time; /* 时间 */
bit CLflag; /* 测量标志 */
char cshu; /* 串数 */
#define T12us (256-12) /*定时器设初值 T=(256-T12us)*12/12MHZ /*定义功能位,串口用于显示 */
sbit VOLCK=P1.0; /* 发射 */
sbit MING=P3.2; /* 外部中断0检测接收信号 */
char idata disp[9]; /* 显示数据 */
char idata number[9]; /* 显示数据 */
char code table[] ={0x03,0x9f,0x25,0x0d,0x99,0x49,0x41,0x1f,0x01,0x09}; /* 码表
0,1,2,3,4,5,6,7,8,9 */
第 8 页 共12 页 */
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
void dispfb() /* 显示5位数据 */
{ char i;
for(i=0;i<5;i++) {
disp[i]=table[number[i]]; }
disp[3]=disp[3]+1; /* 置小数点 */
for(i=0;i<6;i++) {
SBUF=disp[i]; while(TI==0); TI=0; }
}
/* 通用延时子程序 */
void delay( int j )
{ int i; for(i=0;i<j;) i++; }
/* 初始化定时器,CTC0、CTC1用于定时 */
void init_CTC(void )
{
TMOD = 0x21; /* 设CTC1工作于模式2 */
ET0 = 0; /* 不允许CTC0中断 */
}
void init_INT( ) /* 外部中断初始化为高优先级,并开中断 */ {
IP=0x01; /* 置外部中断INT0优先级为高 */
TCON=0; /* 设置外部中断0的中断方式为电平触发 */ }
void serve_INT0( ) interrupt 0
{
/* 外部中断0,用于检测接收信号 */
TR0=0; /* 关闭定时器0 */
EX0=0; /* 关中断 */
time=(long)TL0;
time+=(long)TH0*256;
CLflag=1;
}
/* CTC1中断服务程序,12.5us 中断一次,用于发射 */ void CTC1_INT ( ) interrupt 3
{
VOLCK=~VOLCK;
cshu++;
}
void CTC0_INT ( ) interrupt 1
{
TR0=0;
ET0=0;
第 9 页 共12 页
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
}
void Timetojuli( ) /* 将测量的时间转换为距离 */ {
long i;
i=(long)time;
i=i*340;
i=i/2;
number[4]=i/10000000; /* 十米 */
i=i-number[4]*10000000;
number[3]=i/1000000; /* 米 */
i=i-number[3]*1000000;
number[2]=i/100000; /* 分米 */
i=i-number[2]*100000;
number[1]=i/10000; /* 厘米 */ i=i-(long)number[1]*10000;
number[0]=i/1000; /* 毫米 */ }
uchar getkey( ); /* 读键盘 */
/*主程序*/
void main()
{
int i, key;
init_CTC( ); /* 初始化定时器 */
init_INT( ); /* 初始化外部中断 */
CLflag=1; /* 测量标志 */
for(i=6;i>4;i--) disp[i]=0xff;
cshu=0; /* 传数 */
delay(200); /*延时*/;
IE=0x80; /* 开中断 */
ET1=0; ET0=0;
TR1=0; TR0=0;
TL1=T12us; TH1=T12us;
while(1)
{
key=getkey( ); /* 读键盘 */
if(key==0x0fe && CLflag==1 ) /* 测量 */ {
key=0; CLflag=0;
cshu=0;
TL1=T12us; TH1=T12us;
TL0 = 0; TH0 = 0; /* 定时器0的初始时间 */ TR0=1; /* 启动定时器0,开始记时 */ TR1=1; /* 启动定时器1,发送信号 */ ET1=1;
第 10 页 共12 页
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
while(cshu<12) ;
ET1=0; /* 发十个脉冲串 */
TR1=0;
delay(95);
EX0=1;
while(!CLflag);
if( cshu>=10 && CLflag==1)
{ Timetojuli( );
dispfb();
}
}
}
}
uchar getkey( )
{
char flag;
uchar key, keytemp;
flag=0;
keytemp=P1;
if(keytemp==0xff) return(255);
else {
flag=1;
delay(100);
key=P1;
if(key==keytemp) return(key);
else return(255);
}
}
五、实验结果及分析
表2是利用本文的测距仪进行实际测量的结果。[www.61k.com)由表中数据可见, 在20~150cm 范围内误差相对较小;小于20cm 范围内误差较大,这是因为超声波距离测量存在一定范围的盲区,盲区的出现是因为发出信号必须有一个上升时间, 当距离太近时计算机系统已不能处理迅速返回的反射波信号, 所以距离小于0.2米测量误差明显增加。
300cm以后的数据误差明显增大, 这是由于发射功率不够大, 接收到的信号很微弱, 引入了一些干扰因素。但电路引入温度补偿电路后总的实验结果误差在厘米级,基本上可以满足测量要求。
第 11 页 共12 页
超声波测距原理 超声波传感器测距原理
基于单片机的超声波测距仪设计
表2 测距仪实测结果
结束语
本系统利用超声波传感器实现无接触式空气测距,没有考虑环境温度对超声波传递速度的影响,故本系统在常温下具有测量精度高、抗干扰能力强、反应速度快等特点,可适用于各种水文液位测量、障碍物的识别以及车辆自动导航等领域,因此具有广阔的应用前景。(www.61k.com]
第 12 页 共12 页
四 : 声波武器:声波武器-简介,声波武器-原理
声波武器(Sonic_weaponry)就是利用声音对目标造成杀伤或干扰的武器。一般声波武器都不会使用人类可听频率范围内的声波。对人体的伤害取决于它的能量与攻击目标之间的距离。可整夜地对目标进行干扰,让强烈的声波通过人的身体,使人彻夜难眠。连续的失眠会导致人无法完成工作任务。
声波武器_声波武器 -简单介绍

一般人认为,声音与听觉是连在一起的,但它作为1种空气波,在聚焦后便成为攻击武器。声脉冲对人体的伤害取决于它的能量与攻击目标之间的距离,轻者可以使人有被轻轻拍打或沉重一击的感觉;重者能让人喘不过气来、头痛、休克甚至窒息死亡。另外,声波武器还可整夜地对目标进行干扰,让强烈的声波通过人的身体,使人彻夜难眠。连续的失眠会导致人无法完成工作任务。
[www.61k.com]除了集束声波系统之外,声波武器还需有1个目标锁定系统。这一技术利用电磁波在建筑物内碰到与人的体温接近的表面后会产生反射的原理,可以隔着墙壁重现建筑物内的人物形象。声波武器加上目标锁定系统,可精确地鉴别和瞄准隔墙的目标人物。由于隐蔽在房间里的声波武器不会对房屋和目标所在的房屋造成破坏,所以人们无法用眼睛来发现它。攻击波在穿过目标后,消散在远处的大气中,成了“来无踪去无影”的子弹。
因为声波枪发出的精细高能声波束能使恐怖分子晕头转向,丧失劫机能力,同时又不会对飞机和其他机上人员造成伤害,所以它能在安全领域大显身手。
声波武器_声波武器 -原理
当人没有任何保护的情况下处在存在120分贝以上的音量可听声音的环境里会感到不适或损伤听力系统,当音量上升到150分贝以上时处在这种环境的人将出现鼓膜破裂出血,失去听力,甚至还会精神失常。经过研究发现次声波不容易衰减,不易被水和空气吸收,次声波的波长往往很长,因此能像电磁波一样绕开障碍物发生衍射,杀伤范围很大,但难以控制方向。大功率的次声波能令内脏产生强烈共振,使人感到恶心、头痛、呼吸困难甚至会导致血管破裂,内脏损伤。而大功率的超声波的作用效果与次声波差不多,但传递方向性比次声波好,几乎沿直线传播,容易控制,直线穿透能力强,但杀伤范围小。一般声波武器都不会使用人类可听频率范围内的声波,因为次声波与超声波隐蔽性强。
声波武器_声波武器 -分类
次声波武器
次声波武器可分为2类。1类是神经型次声波武器,其振荡频率同人类大脑的节律极为近似,产生共振时,会强烈刺激人的大脑,使人神经错乱,癫狂不止。另1类是内脏器官型次声波武器,其振荡频率与人体内脏器官的固有振荡频率相近,当产生共振时,会使人的五脏六腑剧痛无比,甚至导致人体异常,直至死亡。
强声波武器
强声波武器能发出足以威慑来犯者或使来犯者失去行动能力的强声波,而不会对人体造成长期的危害。它主要用于保护军事基地等重要设施。当有人靠近时,这种声学武器首先发出声音警告来人。如果来人继续靠近,声音就会变得令人胆战心惊。假如来人置之不理还继续逼近,这种声学武器就会使他们丧失行动能力。
超声波武器
超声波武器能利用高能超声波发生器产生高频声波,造成强大的空气压力,使人产生视觉模糊、恶心等生理反应,从而使人员战斗力减弱或完全丧失作战能力。这种武器甚至能使门窗玻璃破碎。
噪声波武器
噪声波武器也可以分为2种。1种是专门用来对准敌方指挥部的定向噪声波武器,它利用小型爆炸产生的噪声波来麻痹敌指挥人员的听觉和中枢神经,必要时可使人员在两分钟内昏迷。另1种是噪声波炸弹,它同样可以麻痹人的听觉和中枢神经,使人昏迷,主要用于对付劫机等恐怖分子活动,据称效果很好。
集束声波脉冲
利用流体压缩技术把高能声波加载在高速推进的流体上,令高速推进的流体像冲击波一样而且又带有高能声波的特性。
声波武器_声波武器 -用途

美国陆军在伊拉克战场上曾使用过。
在亚丁湾打击索马里海盗的护航任务中,中国海军第五批护航编队的护航舰艇上装备了声波武器——“金嗓子”,对索马里海盗构成了有效威慑。
英国国防部证实,英国将在2012年伦敦奥运会期间部署声波武器用于安保。奥运的时候,英国皇家海军将在巡逻艇上部署这种装置,以控制泰晤士河面的船只。
近日,在浙江温州市发生的一件事在网络上引发不小关注:1个居民小区的业主委员会花26万元买来“高音炮”,“还击”旁边广场上的噪音。1日,浙江省委主要领导在一次会议上,对温州市鹿城区相关部门的不作为提出了批评。目前,这套“声波武器”已被拆除。
打击广场舞有效武器
“呜-呜-呜……”3月29日16时,温州市中心区松台广场对面的高楼突然传来一阵急促、惊悚的警报声。一群正在广场上引吭高歌卡拉OK的人皱起了眉头、歌喉哑然;一批准备晚上去high广场舞的大妈们闻讯,不得不临时取消了每天雷打不动的活动。
警报声来自广场对面“新国光大厦”小区C幢4楼平台,那里有六个大喇叭组合成的高音团队一起朝着松台广场方向播放。警报声过后,传出一段字正腔圆的男声:“请遵守中华人民共和国环境噪声污染防治法,立即停止违法行为……”刺耳的警报声与语音播报循环播放。
原来,这是业主委员会垫资26万元买来这套“声波武器”。
当地规定跳“广场舞”要先登记使用场地
“声波武器”持续“还击”了两天,3月31日下午,新国光大厦的业主委员会拆除了这套“远程定向强声扩音系统”。
4月1日,浙江省委主要领导在一次会议上,对温州市鹿城区相关部门的不作为提出了批评。当晚,鹿城区委、区政府召开专题研究会,作出多项整治措施:鉴于广场等公共场所与百姓的日常生活息息相关,今后对群体性聚集广场活动要进行细腻化管理,使用场地实行登记制。在广场设置分贝仪+电子显示屏,方便广场舞人员和周边群众自律、监督。探索大型广场使用音响由政府掌控的办法,广场噪音高低的“旋钮”掌握在政府手里,实现一劳永逸。
61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1