一 : 手机电路原理,通俗易懂
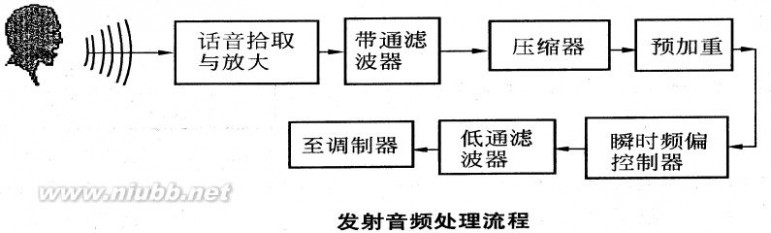
图 2-5
45
手机电路图 手机电路原理,通俗易懂
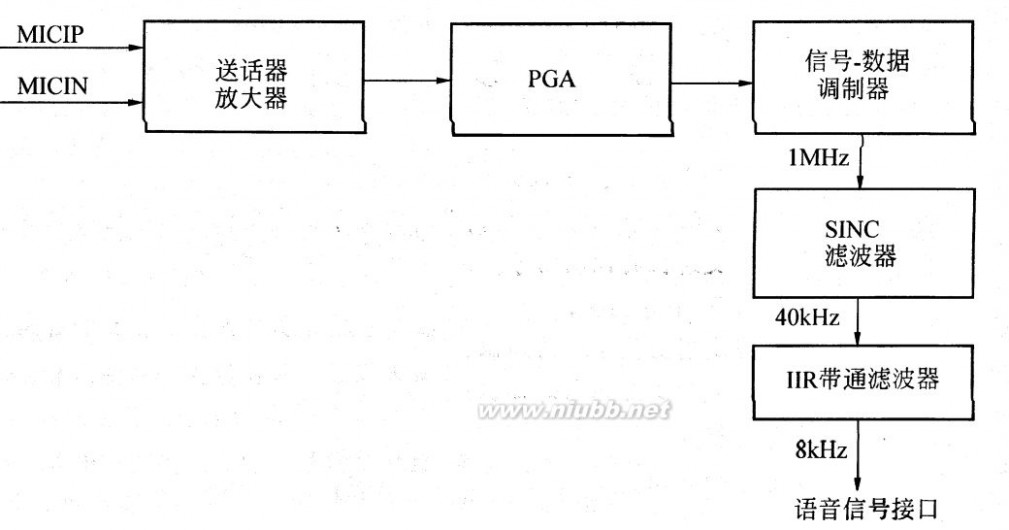
在通信中,要将话音信号发送出去,首先需利用电子器件、电路将话音信号转换成模拟电信号,这就是通常所说的话音拾取电路。[www.61k.com)常用的声-电转换器件为送话器(microphone,又称话筒、微音器等)。
通常,送话器拾取的话音信号是一个频率范围为几十Hz到约20kHz的信号,这将使电路非常复杂。事实证明,人们通常只对频率为270~3400Hz的信号敏感,且能达到一定的清晰度,这个频率范围的话音信号完全能满足一般通信业务。所以,经音频放大器放大后的信号要通过一个带通滤波器以形成话音调制信号的频带。
从有线电话的技术要求知道,对电话手柄的要求较高,以满足对说话者的话音信号的拾取。现在,手机越来越趋向于小型化,送话器与手机使用者的嘴的距离越来越远,这就要求送话器的灵敏度比较高,由此带来一个问题——在某种程度上说背景噪声较大(有时远处的声音也会被发送出去),所以手机电路中发射音频也有其特点,下面几幅图可以说明问题。
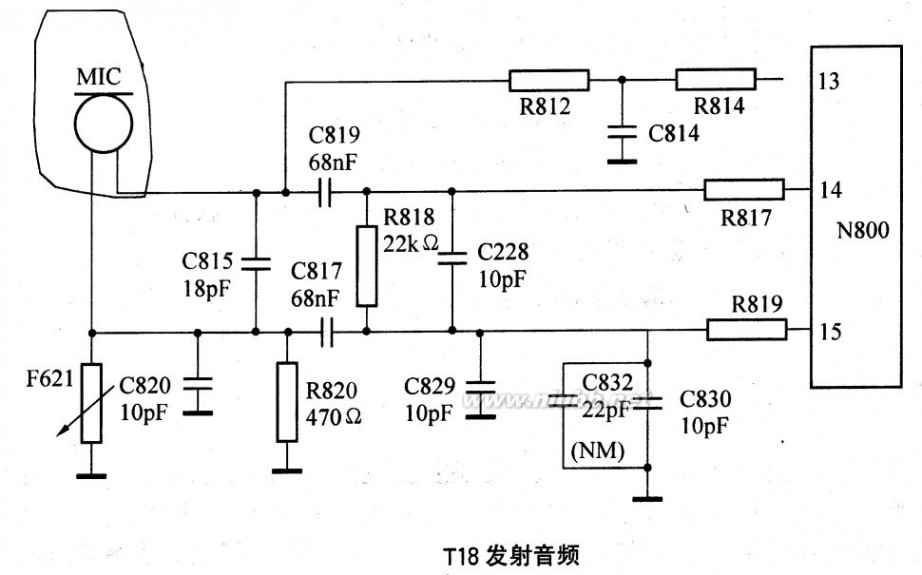
图 2-6
图2-6是爱立信T18的话音拾取电路。在看该电路时,还应注意话音频带形成和送话器偏压等,如图2-7所示(MIC是送话器;BIAS是偏压)。
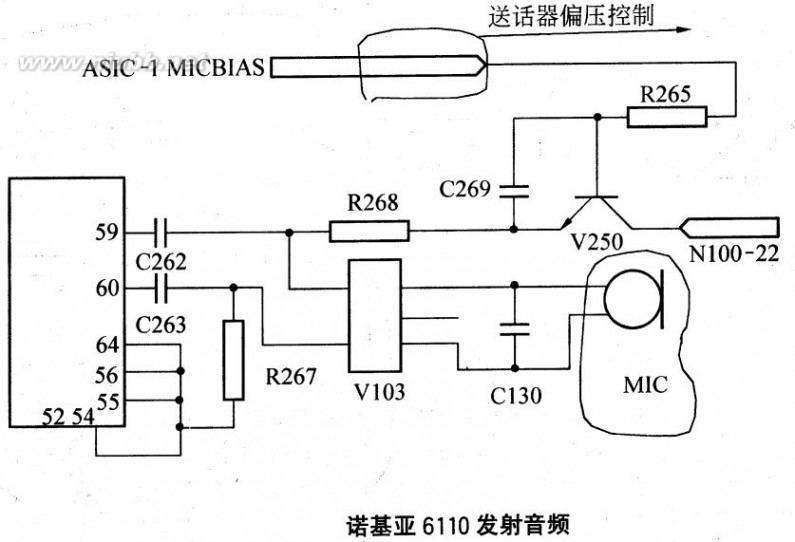
图 2-7
送话器需要偏压才能工作,其偏压是直流电压。在讲述放大器时我们曾提到偏压的查找 46
手机电路图 手机电路原理,通俗易懂
方法:偏压只能通过电阻或电感,所以只要找到MIC或送话器的图形符号,其偏压是容易查找的。[www.61k.com]如图2-8所示。

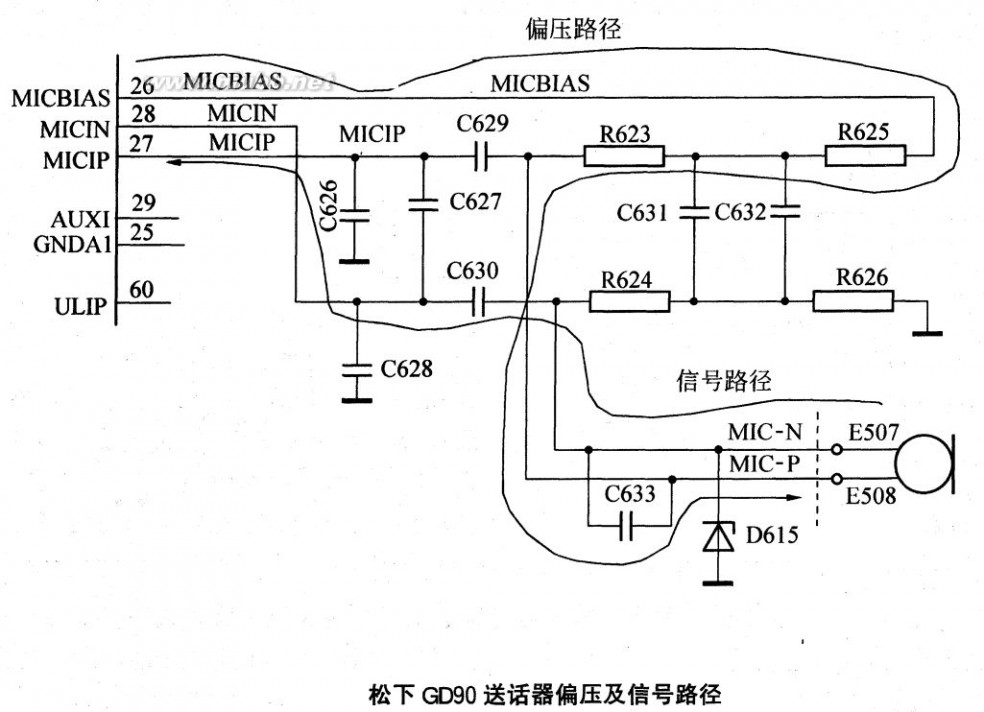
图 2-8
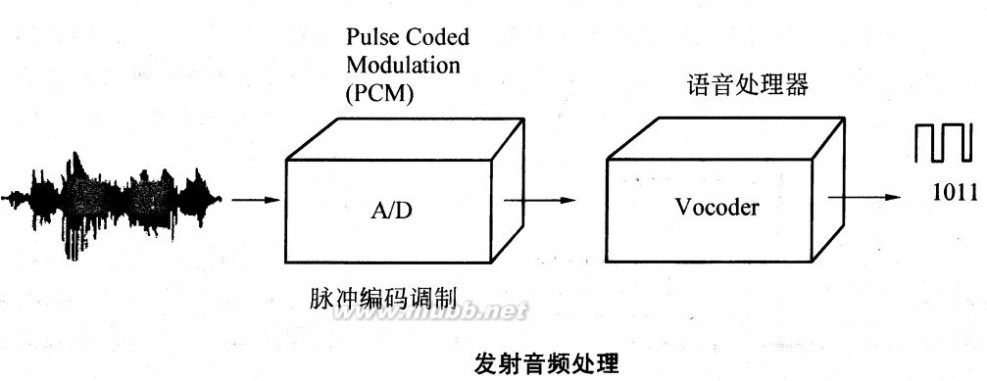
实际上,发射音频处理就是将模拟的话音信号进行数字化处理的过程,如图2-9所示。 模拟的话音信号先经过一A/D转换电路(PCM编码器),将模拟的话音电信号转换为数字信号。数字化的语音信号在语音处理器(通常称其为DSP)中经加密、分间插人等处理,得到数码的语音信号。若就诺基亚8810的发射逻辑音频而言,则:
送话器转换得到的模拟话音电信号首先在音频处理模块COBBA中进行前置放大,放大 47
手机电路图 手机电路原理,通俗易懂
后的信号在PCM编码器中进行A/D转换,得到数字语音信号。(www.61k.com)该信号经串行总线将信号送到DSP。在DSP中,数字语音信号经话音检测、语音编码、卷积编码、分间插人、脉冲格式化与调制,得到数码语音信号。该信号经无线通信呼叫处理器的DSP接口与COBBA接口,将信号送到COBBA的数字接口电路中。在COBBA中,信号经一个线性分离器及D/A转换,得到67.707KHz的发射基带信号(如图2-10所示)。
图
2-9
图
2-10
48
手机电路图 手机电路原理,通俗易懂
第四章 电 源 系 统
不同系列手机电源部分都有各自的特点,维修时需针对具体的手机电路具体分析。[www.61k.com)一般手机都是由一个电源模块产生几组电压向接收、发射、逻辑、显示等部分供电,一旦手机电源部分不能正常工作,其相应部分也就会出现某种故障。
一、开机信号电压
手机的开机方式有两种,一种是高电平开机,也就是当开关键被按下时,开机触发端接到电池电源,是高电平启动电源电路开机;一种是低电平开机,也就是当开关键被按下时,开机触发线路接地,是低电平启动电源电路开机。
爱立信、三星手机和摩托罗拉T2688手机都是高电平触发开机。摩托罗拉、诺基亚及其他多数手机都是低电平触发开机。如果电路图中开关键的一端接地,则该手机是低电平触发开机,如果电路图中开关键的一端接电池电源,则该手机是高电平触发开机。
开机信号电压是一个直流电压,在按下开机键后应由低电平跳到高电平(或由高电压跳到低电平)。开机信号电压用万用表测量很方便,将万用表黑表笔接地,红表笔接开机信号端,接下开机键后,电压应有高低电平的变化,否则,说明开机键或开机线不正常。
三、逻辑电路供电电压
逻辑电路供电电压基本上都是不受控的,即只要按下开机键就能测到,逻辑电路供电电压一般是稳定的直流电压,用万用表可以测量,电压值就是标称值。
四、射频电路供电电压
手机的射频电路供电电压比较复杂,既有直流供电电压,又有脉冲供电电压,而且这些供电电压大都是受控的。其目的是为了省电和与网络同步,使部分电路在不需要时不工作,否则,若射频电路都启动,手机功能就会紊乱。但逻辑电路不能采用这种供电方式,因为逻辑电路是手机的指挥中心,在任一时刻失去供电电压,整机就会瘫痪。
射频电路的受控电压一般受CPU输出的接收使能RXON(RXEN)、发射使能TXON(TXEN)等信号控制,由于RXON、TXON信号为脉冲信号,因此输出的电压也为脉冲电压,一般需用示波器测量,用万用表测量结果要小于标称值。
测量接收电路的供电应启动接收电路,测量发射电路的供电应启动发射电路,手机在待机状态下,接收电路是每隔一定时间启动一次,发射电路则不启动,手机拨打电话或“112”时,则接收和发射电路可以同时启动,所以,在测量时若测不到供电电压,应检查是否启动了相应的电路。应在手机开机后的30秒内进行检测。
五、SIM卡电路供电电压
手机的SIM卡有6个触点,其中标注为SIM Vcc或Vcc的触点为SIM卡供电端,由于有两种不同工作电压的SIM卡,即3V SIM卡和5V SIM卡,所以在手机内部存在3V SIM卡电路及5V SIM卡电路。测量SIM Vcc电压最好选在开机瞬间用示波器进行测量,图4-1所示是爱立信T28手机所测的SIM Vcc波形。用万用表测量SIM Vcc电压,要远远小于3V或5V。
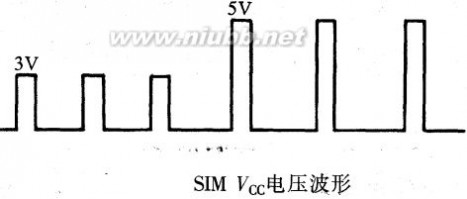
图 4-1 SIM Vcc电压波形
六、显示电路供电电压
显示电路采用直流供电,手机开机后,即可用万用表方便地进行测量,下面以爱立信T28手机为例进行分析
49
手机电路图 手机电路原理,通俗易懂
爱立信T28手机的显示屏通过5个触点和电路相连,如图7-2所示。(www.61k.com)
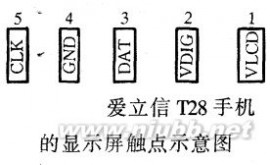
图7-2 爱立信T28手机显示触电示意图
图中:①脚VLCD为显示屏对比度控制端,电压为6v,无此电压,LCD无显示,太高则LCD发暗;
②脚为显示屏直流供电端,电压为2.8V。这两处电压可方便地用万用表测量。
③脚为DAT数据输入端,来自CPU;
④脚接地;
⑤脚为时钟输入端,来自CPU。
DAT、CLK两脚需用示波器观察其波形(2.8V的方波),用万用表测量无法判断电路工作是否正常。
七、其他电路供电电压
其他电路,如听筒电路、振铃电路、振子电路的供电较简单,一般直接由电池电压供电,可方便地用万用表测量。送话器电路一般由音频电路为其提供偏压,亦可方便地用万用表进行测量。
小结:
双频手机的电路通常是增加一些DCS1800M的电路,但其中相当一部分电路是DCS与GSM通道公用的所以在此不再重复讲解。
50
二 : 子网掩码的计算(通俗易懂方法)
子网掩码(Subnet mask)
首先申明个人不是根据课本使用专业讲法!以下纯属个人理解通俗易懂说法讲解!
> 首先我们要弄清楚几个概念,才能很清楚的做解答。[www.61k.com]
1 什么是网络号?
? 网络号是每一段IP地址的第一组,通常用于表示某一段IP地址池。
? 如:192.168.1.0/24 其表示 192.168.1.0~192.168.1.255 255.255.255.0
2 什么是广播号?
? 广播号是每一段IP地址的最后一组,通常用于网络中的广播,顾名思义。
? 如:192.168.1.0/24 其中最后一组 192.168.1.255 就是该段IP的广播号。
3 什么是子网掩码?
? 子网掩码通常是用于划分网络使用,尤其公网IP地址比较常见。
? 如:61.166.150.2/30和61.166.150.3/30是不在同一个网段的。后面做详细解释。 4 二进制如何换算?
?

> 可划分子网数计算公式
1 可划分子网数 = 2 ^ (借位组中”1”个数)
? 如:255.255.255.128 → 11111111.11111111.11111111. 1 000000
? 结果:2 ^ 1 = 2 255.255.255.128 可将网络划分为2个网段
> 可容纳主机数计算公式
1 可容纳主机数 = 2 ^ (借位组中“0”个数)
? 如:255.255.255.128 → 11111111.11111111.11111111. 1 000000
? 结果:2 ^ 7 = 128 255.255.255.128 每个网段最多可容纳128台主机。
> 注:可容纳主机数和可用IP地址是两回事。
1 可容纳主机数是计算出每个网段能容纳的数量,其中已经包含网络号和广播号! 2 可用IP地址却不包含网络号和广播号!所以还要减去。
? 可用IP地址 = 可容纳主机数 – 2
> 个人心得:每个网段的IP数是多少?
1 可能当我们计算出某子网能够划分出2或者4个子网,这个时候我们可以很便捷的使用
256/2 = 128 接着我们就能直接分出每一组IP地址池。每一组凑够128个IP即可, 即是:192.168.0.1~192.168.0.127
192.168.0.128~192.168.0.255
以上知识点只要记住即可计算任何子网划分!题目无论是要求计算子网数、可容纳主机数、可用
子网掩码划分
三 : 卡尔曼滤波的原理说明(通俗易懂)
卡尔曼滤波的原理说明
在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人!
卡尔曼全名Rudolf Emil Kalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。1957年于哥伦比亚大学获得博士学位。我们现在要学习的卡尔曼滤波器,正是源于他的博士论文和1960年发表的论文《A New Approach to Linear Filtering and Prediction Problems》(线性滤波与预测问题的新方法)。如果对这编论文有兴趣,可以到这里的地址下载: http://www.cs.unc.edu/~welch/kalman/media/pdf/Kalman1960.pdf
简单来说,卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。
2.卡尔曼滤波器的介绍
(Introduction to the Kalman Filter)
为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。但是,他的5条公式是其核心内容。结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式。
在介绍他的5条公式之前,先让我们来根据下面的例子一步一步的探索。
假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的,也就是下一分钟的温度等于现在这一分钟的温度(假设我们用一分钟来做时间单位)。假设你对你的经验不是100%的相信,可能会有上下偏差几度。我们把这些偏差看成是高斯白噪声(White Gaussian Noise),也就是这些偏差跟前后时间是没有关系的而且符合高斯分配(Gaussian Distribution)。
另外,我们在房间里放一个温度计,但是这个温度计也不准确的,测量值会比实际值偏差。我们也把这些偏差看成是高斯白噪声。
好了,现在对于某一分钟我们有两个有关于该房间的温度值:你根据经验的预测值(系统的预测值)和温度计的值(测量值)。下面我们要用这两个值结合他们各自的噪声来估算出房间的实际温度值。
假如我们要估算k时刻的是实际温度值。
首先你要根据k-1时刻的温度值,来预测k时刻的温度。因为你相信温度是恒定的,所以你会得到k时刻的温度预测值是跟k-1时刻一样的,假设是23度,同时该值的高斯噪声的偏差是5度 (5是这样得到的:如果k-1时刻估算出的最优温度值的偏差是3,你对自己预测
四 : 卡尔曼滤波的原理说明(通俗易懂)
卡尔曼滤波的原理说明
在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。[www.61k.com)跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人!
卡尔曼全名Rudolf Emil Kalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。1957年于哥伦比亚大学获得博士学位。我们现在要学习的卡尔曼滤波器,正是源于他的博士论文和1960年发表的论文《A New Approach to Linear Filtering and Prediction Problems》(线性滤波与预测问题的新方法)。如果对这编论文有兴趣,可以到这里的地址下载: http://www.cs.unc.edu/~welch/kalman/media/pdf/Kalman1960.pdf
简单来说,卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。
2.卡尔曼滤波器的介绍
(Introduction to the Kalman Filter)
为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。但是,他的5条公式是其核心内容。结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式。
在介绍他的5条公式之前,先让我们来根据下面的例子一步一步的探索。
假设我们要研究的对象是一个房间的温度。根据你的经验判断,这个房间的温度是恒定的,也就是下一分钟的温度等于现在这一分钟的温度(假设我们用一分钟来做时间单位)。假设你对你的经验不是100%的相信,可能会有上下偏差几度。我们把这些偏差看成是高斯白噪声(White Gaussian Noise),也就是这些偏差跟前后时间是没有关系的而且符合高斯分配(Gaussian Distribution)。
另外,我们在房间里放一个温度计,但是这个温度计也不准确的,测量值会比实际值偏差。我们也把这些偏差看成是高斯白噪声。
好了,现在对于某一分钟我们有两个有关于该房间的温度值:你根据经验的预测值(系统的预测值)和温度计的值(测量值)。下面我们要用这两个值结合他们各自的噪声来估算出房间的实际温度值。
假如我们要估算k时刻的是实际温度值。
首先你要根据k-1时刻的温度值,来预测k时刻的温度。因为你相信温度是恒定的,所以你会得到k时刻的温度预测值是跟k-1时刻一样的,假设是23度,同时该值的高斯噪声的偏差是5度 (5是这样得到的:如果k-1时刻估算出的最优温度值的偏差是3,你对自己预测
卡尔曼 卡尔曼滤波的原理说明(通俗易懂)
的不确定度是4度,他们平方相加再开方,就是5)。[www.61k.com)
然后,你从温度计那里得到了k时刻的温度值,假设是25度,同时该值的偏差是4度。
由于我们用于估算k时刻的实际温度有两个温度值,分别是23度和25度。究竟实际温度是多少呢?相信自己还是相信温度计呢?究竟相信谁多一点,我们可以用他们的covariance 来判断。因为Kg^2=5^2/(5^2+4^2),所以Kg =0.78,我们可以估算出k时刻的实际温度值是:23+0.78*(25-23) =24.56度。可以看出,因为温度计的covariance比较小(比较相信温度计),所以估算出的最优温度值偏向温度计的值。
现在我们已经得到k时刻的最优温度值了,下一步就是要进入k+1时刻,进行新的最优估算。到现在为止,好像还没看到什么自回归的东西出现。对了,在进入k+1时刻之前,我们还要算出k时刻那个最优值(24.56度)的偏差。算法如下:((1-Kg)*5^2)^0.5 =2.35。这里的5就是上面的k时刻你预测的那个23度温度值的偏差,得出的2.35就是进入k+1时刻以后k时刻估算出的最优温度值的偏差(对应于上面的3)。
就是这样,卡尔曼滤波器就不断的把covariance递归,从而估算出最优的温度值。他运行的很快,而且它只保留了上一时刻的covariance。上面的Kg,就是卡尔曼增益 (Kalman Gain)。他可以随不同的时刻而改变他自己的值,是不是很神奇!
下面就要言归正传,讨论真正工程系统上的卡尔曼。
3. 卡尔曼滤波器算法
(The Kalman Filter Algorithm)
在这一部分,我们就来描述源于Dr Kalman 的卡尔曼滤波器。下面的描述,会涉及一些基本的概念知识,包括概率(Probability),随机变量(Random Variable),高斯或正态分配(Gaussian Distribution)还有State-space Model等等。但对于卡尔曼滤波器的详细证明,这里不能一一描述。
首先,我们先要引入一个离散控制过程的系统。该系统可用一个线性随机微分方程(Linear Stochastic Difference equation)来描述:
X(k) =A X(k-1)+B U(k)+W(k)
再加上系统的测量值:
Z(k) =H X(k)+V(k)
上两式子中,X(k)是k时刻的系统状态,U(k)是k时刻对系统的控制量。A和B是系统参数,对于多模型系统,他们为矩阵。Z(k)是k时刻的测量值,H是测量系统的参数,对于多测量系统,H为矩阵。W(k)和V(k) 分别表示过程和测量的噪声。他们被假设成高斯白噪声(White Gaussian Noise),他们的covariance 分别是Q,R(这里我们假设他们不随系统状态变化而变化)。
对于满足上面的条件(线性随机微分系统,过程和测量都是高斯白噪声),卡尔曼滤波器是最优的信息处理器。下面我们来用他们结合他们的covariances 来估算系统的最优化输出(类似上一节那个温度的例子)。
卡尔曼 卡尔曼滤波的原理说明(通俗易懂)
首先我们要利用系统的过程模型,来预测下一状态的系统。(www.61k.com]假设现在的系统状态是k,根据系统的模型,可以基于系统的上一状态而预测出现在状态:
X(k|k-1) =A X(k-1|k-1)+B U(k) ……….. (1)
式(1)中,X(k|k-1)是利用上一状态预测的结果,X(k-1|k-1)是上一状态最优的结果 ,U(k)为现在状态的控制量,如果没有控制量,它可以为0。
到现在为止,我们的系统结果已经更新了,可是,对应于X(k|k-1) 的covariance还没更新。我们用P表示covariance:
P(k|k-1)=A P(k-1|k-1) A’+Q (2)
式(2)中,P(k|k-1)是X(k|k-1)对应的covariance,P(k-1|k-1)是X(k-1|k-1)对应的covariance,A’表示A的转置矩阵,Q是系统过程的covariance。式子1,2就是卡尔曼滤波器5个公式当中的前两个,也就是对系统的预测。
现在我们有了现在状态的预测结果,然后我们再收集现在状态的测量值。结合预测值和测量值,我们可以得到现在状态(k)的最优化估算值X(k|k):
X(k|k)= X(k|k-1)+Kg(k) (Z(k)-H X(k|k-1)) (3)
其中Kg为卡尔曼增益(Kalman Gain):
Kg(k)= P(k|k-1) H’ / (H P(k|k-1) H’ + R) (4)
到现在为止,我们已经得到了k状态下最优的估算值X(k|k)。但是为了要另卡尔曼滤波器不断的运行下去直到系统过程结束,我们还要更新k状态下X(k|k)的covariance:
P(k|k)=(I-Kg(k) H)P(k|k-1) (5)
其中I 为1的矩阵,对于单模型单测量,I=1。当系统进入k+1状态时,P(k|k)就是式子(2)的P(k-1|k-1)。这样,算法就可以自回归的运算下去。
卡尔曼滤波器的原理基本描述了,式子1,2,3,4和5就是他的5 个基本公式。根据这5个公式,可以很容易的实现计算机的程序。
下面,我会用程序举一个实际运行的例子。。。
4. 简单例子
(A Simple Example)
这里我们结合第二第三节,举一个非常简单的例子来说明卡尔曼滤波器的工作过程。所举的例子是进一步描述第二节的例子,而且还会配以程序模拟结果。
根据第二节的描述,把房间看成一个系统,然后对这个系统建模。当然,我们建的模型不需要非常地精确。我们所知道的这个房间的温度是跟前一时刻的温度相同的,所以A =1。没有控制量,所以U (k)=0。因此得出:
X(k|k-1)=X(k-1|k-1) ……….. (6)
式子(2)可以改成:
P(k|k-1)=P(k-1|k-1) +Q ……… (7)
因为测量的值是温度计的,跟温度直接对应,所以H =1。式子3,4,5可以改成以下:
卡尔曼 卡尔曼滤波的原理说明(通俗易懂)
X(k|k)= X(k|k-1)+Kg(k) (Z(k)-X(k|k-1)) ……… (8)
Kg(k)= P(k|k-1) / (P(k|k-1) + R) ……… (9)
P(k|k)=(1-Kg(k))P(k|k-1) ??? (10)
现在我们模拟一组测量值作为输入。[www.61k.com]假设房间的真实温度为25度,我模拟了200个测量值,这些测量值的平均值为25度,但是加入了标准偏差为几度的高斯白噪声(在图中为蓝线)。
为了令卡尔曼滤波器开始工作,我们需要告诉卡尔曼两个零时刻的初始值,是X(0|0)和P(0|0)。他们的值不用太在意,随便给一个就可以了,因为随着卡尔曼的工作,X会逐渐的收敛。但是对于P,一般不要取0,因为这样可能会令卡尔曼完全相信你给定的X(0|0)是系统最优的,从而使算法不能收敛。我选了X(0|0) =1度,P(0|0)=10。
该系统的真实温度为25度,图中用黑线表示。图中红线是卡尔曼滤波器输出的最优化结果(该结果在算法中设置了Q=1e-6,R=1e-1)。
××××××××××××××××××
附matlab下面的kalman滤波程序:
clear
N=200;
w(1)=0;
w=randn(1,N) //产生一个均值为0,方差为1的1*n维向量(白 噪声、正态分布而非均匀分布)
x(1)=0;
a=1; //即A
for k=2:N; // FOR
x(k)=a*x(k-1)+w(k-1); //200个X(k)赋值,初始值?
end //END
V=randn(1,N);
q1=std(V); // 标准差
Rvv=q1.^2;
q2=std(x);
Rxx=q2.^2;
q3=std(w);
Rww=q3.^2;
c=0.2;
Y=c*x+V;
卡尔曼 卡尔曼滤波的原理说明(通俗易懂)
p(1)=0;
s(1)=0;
for t=2:N; //FOR p1(t)=a.^2*p(t-1)+Rww;
b(t)=c*p1(t)/(c.^2*p1(t)+Rvv); // 增益? s(t)=a*s(t-1)+b(t)*(Y(t)-a*c*s(t-1)); // 结果? p(t)=p1(t)-c*b(t)*p1(t);
end //END
t=1:N;
plot(t,s,'r',t,Y,'g',t,x,'b');
// 循环? // RGB? s,Y,x都是向量
五 : 通俗易懂理解谷歌算法及其外部链接
今天有客户问我你们做google排名的原理是什么,我想这个问题很有必要用很通俗的语言来说明一下。因为现在大多seo相关网站,论坛讲解的seo知识都较专业。这些专业的seo知识,别说非专业seo人员,就算一些业内人员也很难全部理解。
为什么我要把谷歌算法以及外部链接并列提出来讲解,我认为,一个网站内部做的再好,代码再规范。他也仅仅是一个孤岛。互联网发展到今日,网站数目不计其数。我们刚做好的一个网站如果不进行一定的外部链接建设,那就如同石沉大海一样,很难被人发现。当然现在一些网站优化公司,将外部链接做到走火入魔。很大部分已经偏离谷歌算法的初衷。谷歌算法的初衷是一个网站更多被提及或者网站内容被转载。就认为这个网站是重要的。那么为什么外部链接在搜索引擎发展这几年始终占据如此重要地位。且在外部链接日益垃圾化的今天,那搜索引擎为什么不去改变一下算法去扭转一下这种网络垃圾化的趋势呢。笔者认为,搜索引擎作为一个算法体系。必然要对网站的各方面因素做一个量化衡量,否则,数以亿计的网站就无法做一个有序的排列。那么外部链接应该说是最重要的一个适合量化的衡量指标。其实从本意来讲,并不是搜索引擎来选择外部链接来作为算法的重要因素。而是一个网站的存在属性促使搜索引擎来这样编写算法。也就是说一个网站被传播才是有意义的。且不管搜索引擎怎样发展,我想都是围绕一个网站的传播价值来设置算法的。
那么再来解释一下什么是有用的外部链接,为什么这样的外部链接是有用的。我们这里做一个形象的比喻,一个网站就好比一个人。讲到这里插一句笔者有一个网站设计的客户,他认为一个网站就是一个人,有思想,有血有肉。有自己的独立表达。我非常认可这种说法,而现实中,我们的绝大多数网站千篇一律,缺乏个性。也就是说,我们要通过一个网站能看到网站背后的人。这样的网站表达才是一个成功的表达。
假如一个人只在中关村有些名气,那这个人顶多也是个小人物。可能就是个柜台营业员。那我们如果要更加出名,就要不断结识上流社会。至少要在海淀区有些名气,这里指的有些名气,很重要的一个指标是很多人认识他或者知道他。网站外部链接建设跟我们一个人成长的道理如出一辙。就是不断拓展网站自身在互联网界的声誉,被其他网站链接就是一种声誉的表现。用专业术语讲就是链接的广泛性。
我想理解了这个道理,我们就不会再为外部链接的问题一头雾水,如何是好了。从而也让我们懂得一个道理。一个网站的成长是需要不断的积累和用心经营的。建站如做人。没有一劳永逸。
本文原创,转载请注明http://www.3renseo.com, 谢谢合作。
本文标题:计算机原理通俗易懂-手机电路原理,通俗易懂61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1