一 : 杜斌_机械通气
机械通气
北京协和医院 杜 斌
机械通气的开始
? 1949 –
1950年 Scandinavia
? 脊髓灰质炎流行 ? 呼吸麻痹者死亡率80%
? 1913年
Janeway
? 第一台定型呼吸机
机械通气的开始
? 1952年
Denmark
? 脊髓灰质炎流行 ? Blegdam Hospital
?31名呼吸肌麻痹患者
?27名相继死亡
? 麻醉科医生Bjan Ibsen
气管插管
机械通气的开始
? 75名病人手法通气
? 24小时内
? 动员250名医学生用手捏气囊 ? 260名护士参加床边护理 ? 消耗250筒氧气 ? 27名工人更换氧气筒 ? 死亡率从87%降低到40%以下
加强医疗病房(ICU)中 如何应用机械通气
多中心描述性研究结果
ICU中的机械通气
? 前瞻性研究
? 参加国: 阿根廷, 巴西, 加拿大, 智利, 西班
牙, 乌拉圭和美国 ? 共计412个ICU ? 4152名患者
? ICU的床位使用率中位数为83%
? 1638名(39%)患者接受机械通气治疗
ICU中的机械通气
机械通气的适应症 ? 急性呼吸功能衰竭 66%
? ARDS
8%
? 慢性呼吸功能衰竭急性加重 ? 昏迷
? 神经肌肉疾病
13% 15% 5%
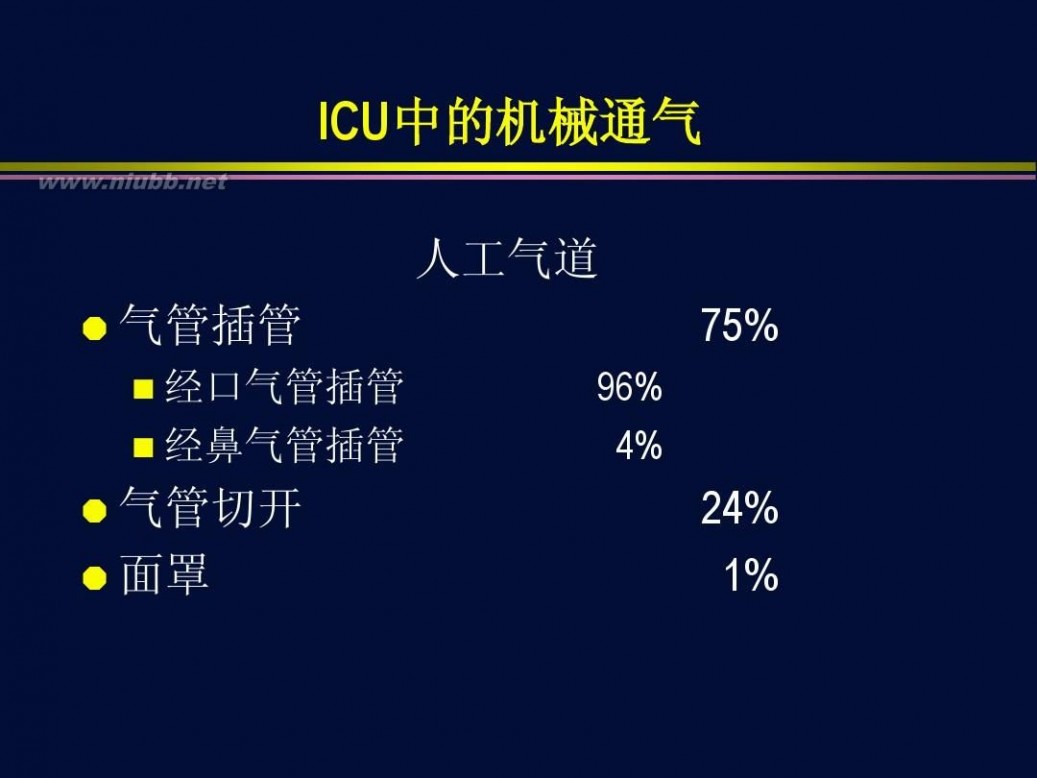
ICU中的机械通气
人工气道
? 气管插管
? 经口气管插管 ? 经鼻气管插管
75%
96% 4%
? 气管切开
? 面罩
24% 1%
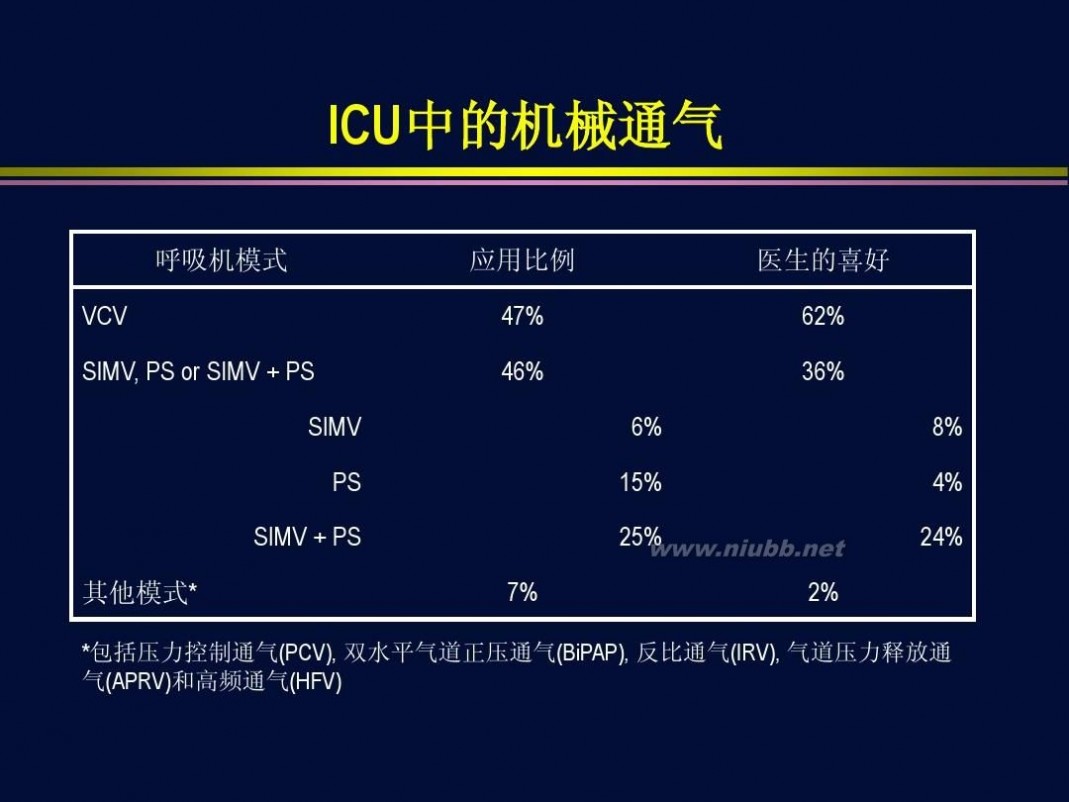
ICU中的机械通气
呼吸机模式 VCV SIMV, PS or SIMV + PS SIMV PS SIMV + PS 其他模式* 7% 应用比例 47% 46% 6% 15% 25% 2% 医生的喜好 62% 36% 8% 4% 24%
*包括压力控制通气(PCV), 双水平气道正压通气(BiPAP), 反比通气(IRV), 气道压力释放通 气(APRV)和高频通气(HFV)
ICU中的机械通气
呼吸机的设置
? 定容通气时的潮气量
9 ml/kg
? 压力支持通气时压力支持水平
19 cmH2O
? 呼气末正压(PEEP)
5 cmH2O
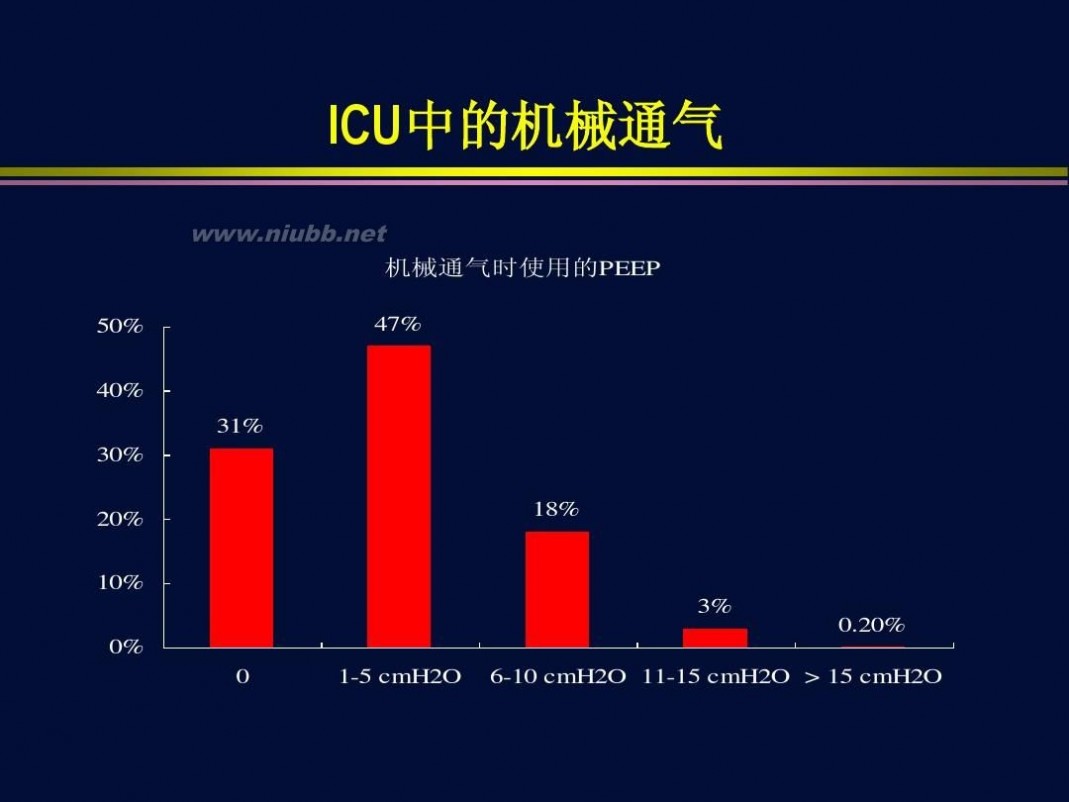
ICU中的机械通气
机械通气时使用的PEEP 50% 40% 31% 30% 20% 10% 3% 0 % 0 1-5 cmH2O 6-10 cmH2O 11-15 cmH2O > 15 cmH2O 0.20% 18% 47%
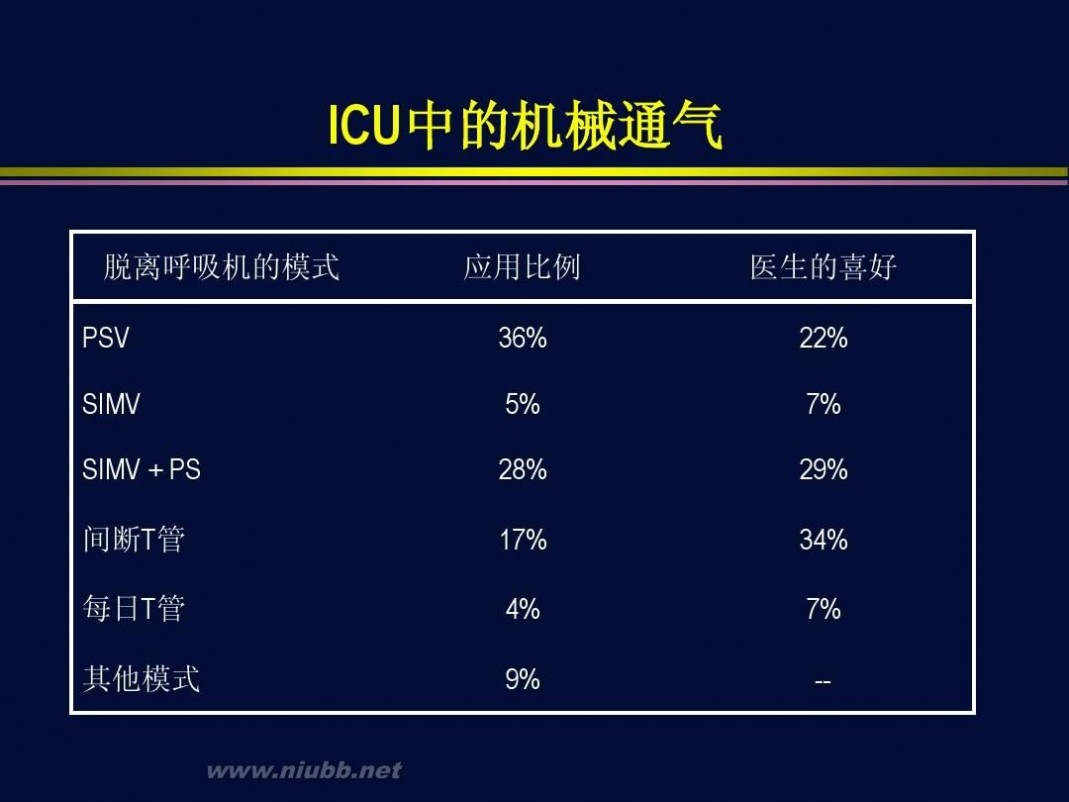
ICU中的机械通气
脱离呼吸机的模式 PSV SIMV 应用比例 36% 5% 医生的喜好 22% 7%
SIMV + PS
间断T管 每日T管 其他模式
28%
17% 4% 9%
29%
34% 7% --
机械通气的模式
选择机械通气各种模式的目的 ? 改善气体交换 ? 增加患者舒适性 ? 加速自主呼吸的恢复
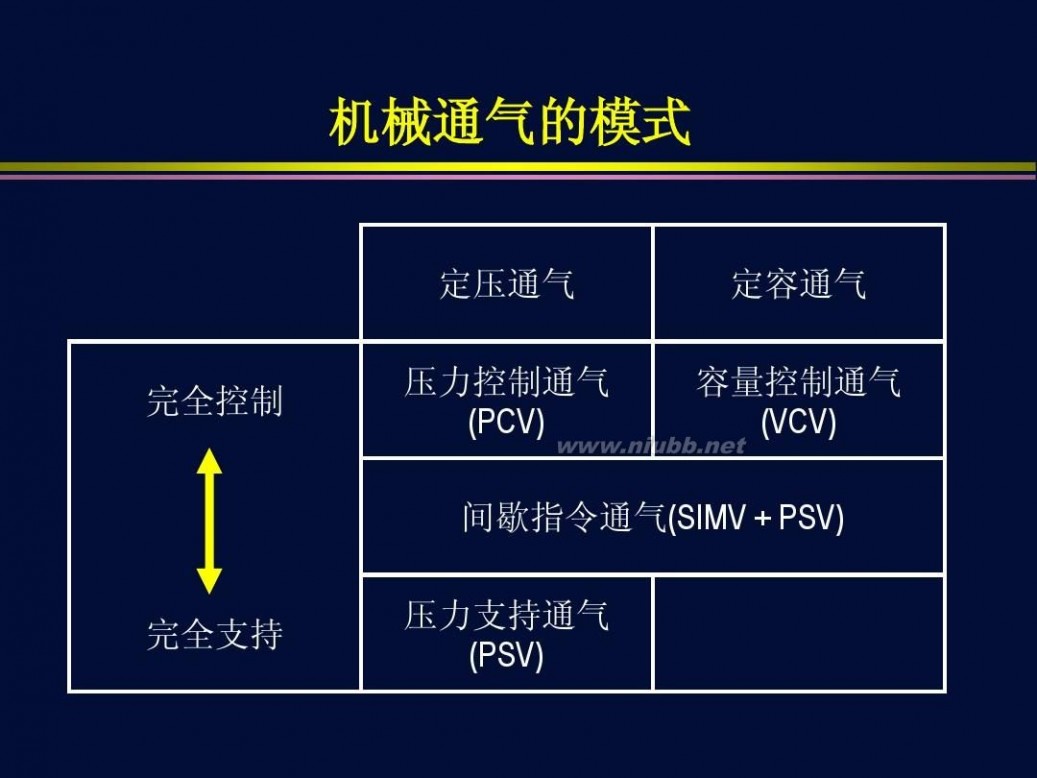
机械通气的模式
定压通气 完全控制 压力控制通气 (PCV) 定容通气 容量控制通气 (VCV)
间歇指令通气(SIMV + PSV) 完全支持
压力支持通气 (PSV)
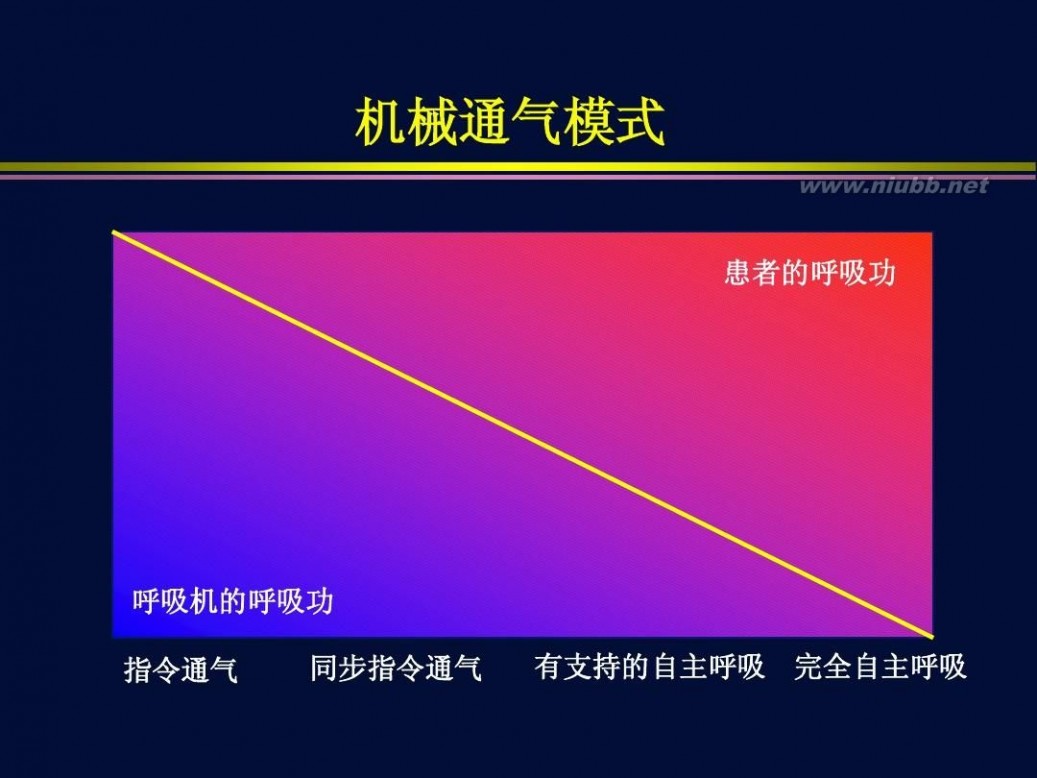
机械通气模式
患者的呼吸功
呼吸机的呼吸功 指令通气 同步指令通气 有支持的自主呼吸 完全自主呼吸
机械通气模式
完全休息
大量体力消耗
模式的选择 = 仅仅是医生的选择
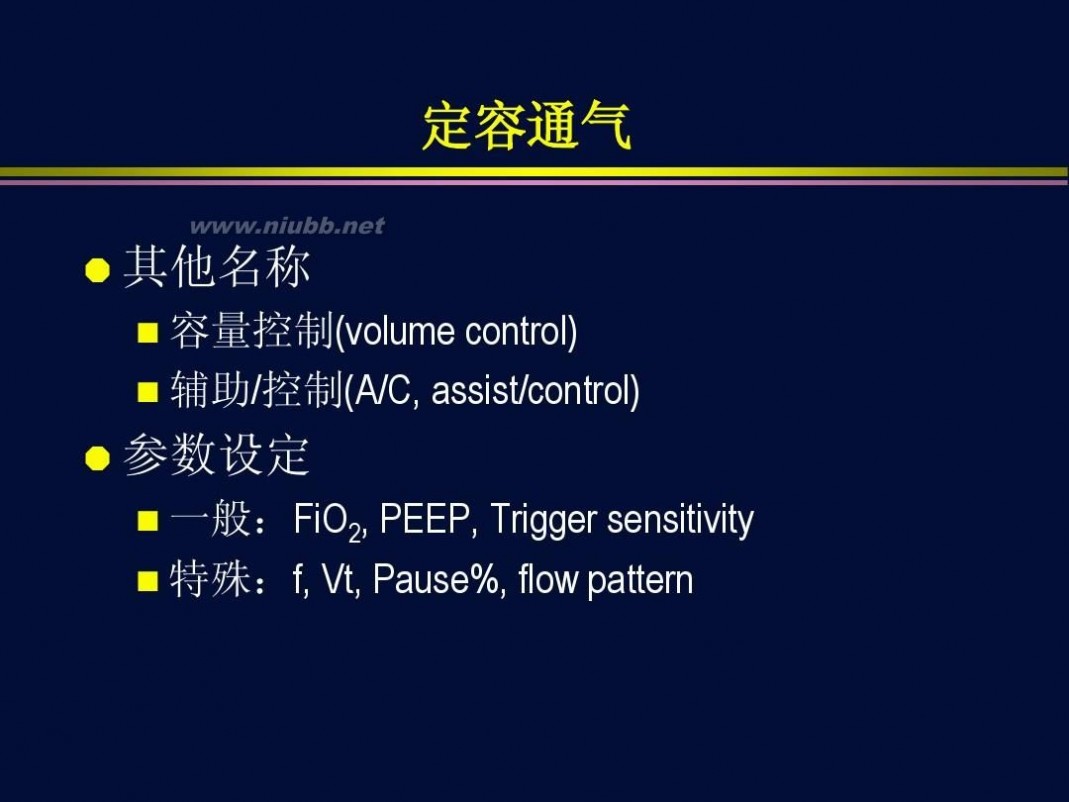
定容通气
? 其他名称
? 容量控制(volume control) ? 辅助/控制(A/C, assist/control)
? 参数设定
? 一般:FiO2, PEEP,
Trigger sensitivity ? 特殊:f, Vt, Pause%, flow pattern
机械通气的模式
定容通气时潮气量和呼吸周期的设定
参数
? ? ? ? ? ? ? ?
MV Vt f (frequency) Flow Tinsp Ttotal Insp% I:E
?
?
? ?
?
公式 MV = f x Vt Vt = flow x Tinsp Ttotal = 60 / f Tinsp = Ttotal x Insp% I:E = Tinsp / (Ttotal – Tinsp)
机械通气的模式
定容通气时潮气量和呼吸周期的设定
MV Servo 900C Drager Evita2 NPB 840 TAEMA Horus4 Bear 1000 Newport E200 ? f ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? Vt Flow Ttotal Tinsp Insp% ?
机械通气的模式
定容通气时潮气量的选择 ? 10 – 15 mL/kg ? 8 – 12 mL/kg ? 6 – 8 mL/kg
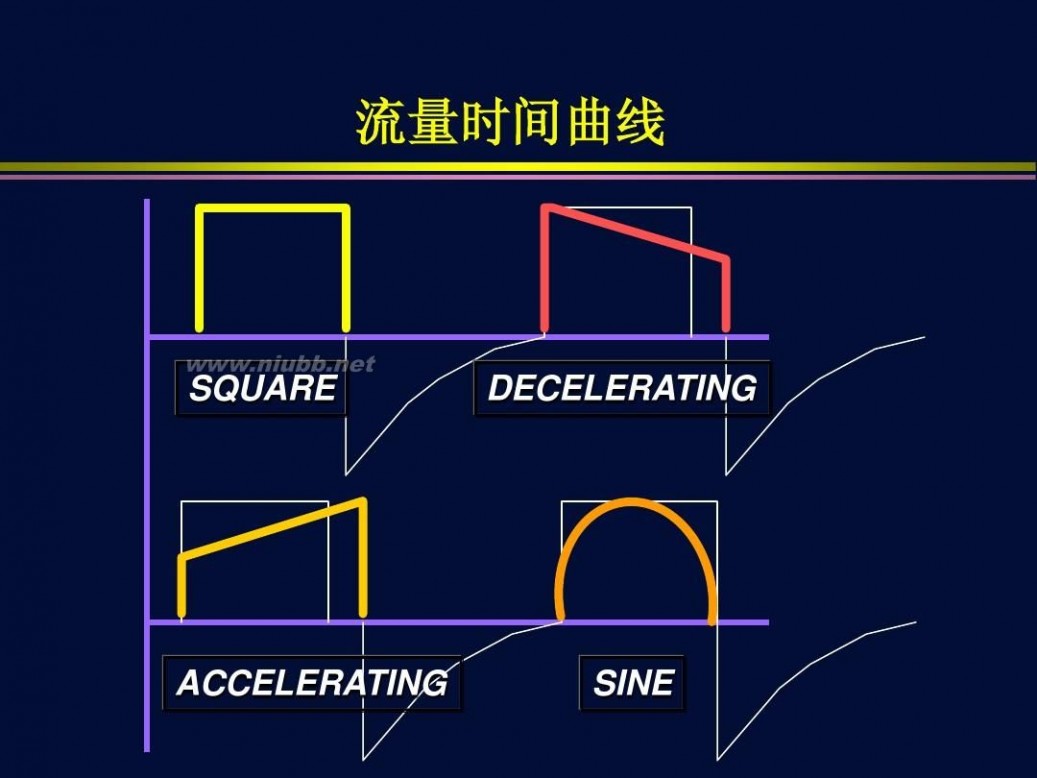
流量时间曲线
SQUARE
DECELERATING
ACCELERATING
SINE
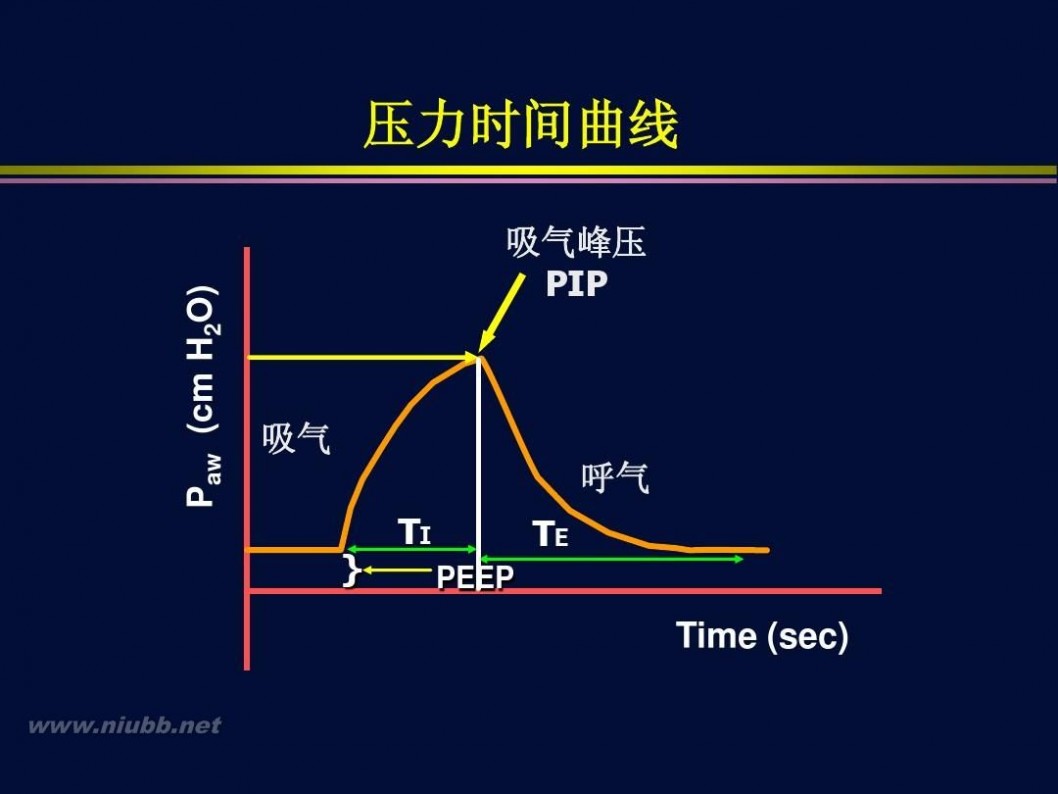
压力时间曲线
吸气峰压 PIP
Paw (cm H2O)
吸气 呼气 } TI
PEEP
TE Time (sec)
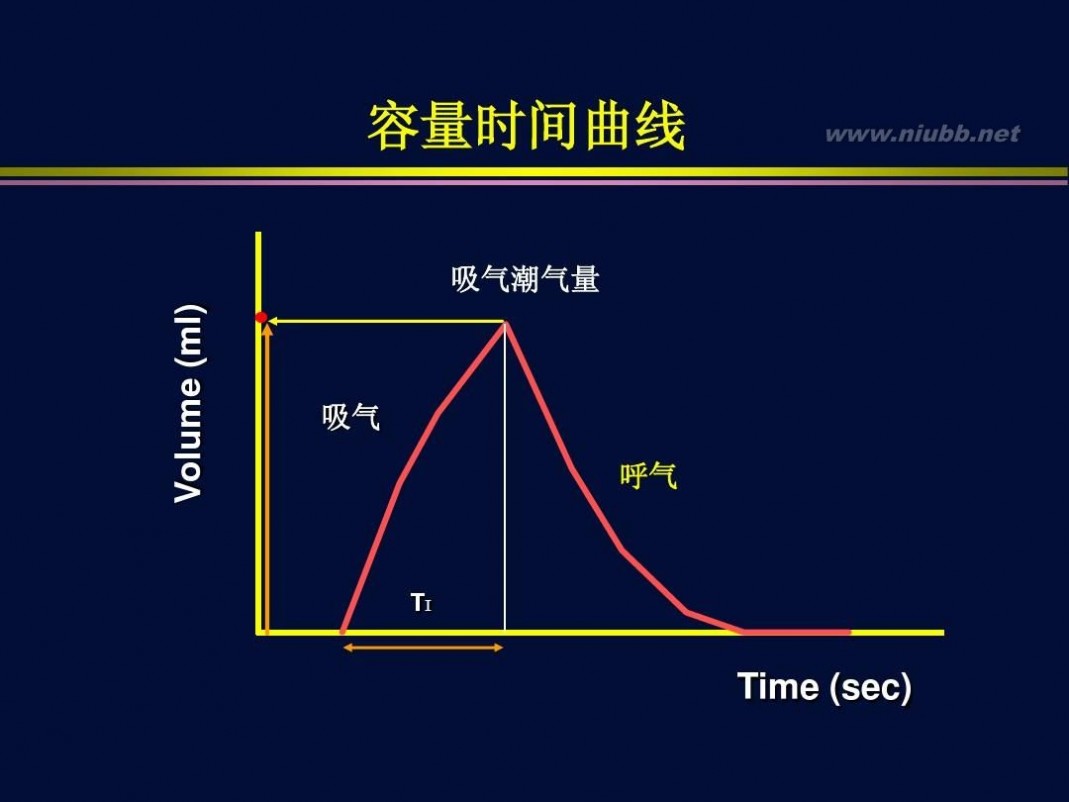
容量时间曲线
吸气潮气量
Volume (ml)
吸气
呼气
TI
Time (sec)
机械通气的模式 – 定容通气(VCV)
气道峰压, Ppeak
pressure 平台压, Pplat PEEP
flow
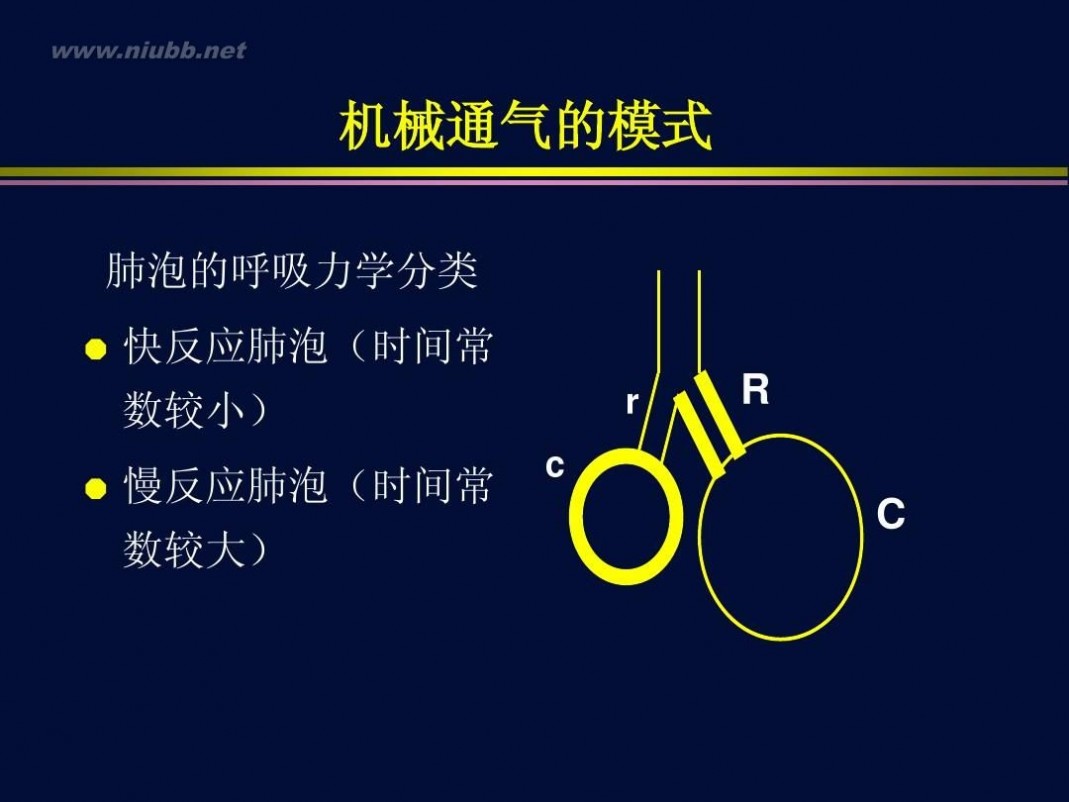
机械通气的模式
肺泡的呼吸力学分类
?
快反应肺泡(时间常
数较小)
?
r
c
R C
慢反应肺泡(时间常 数较大)
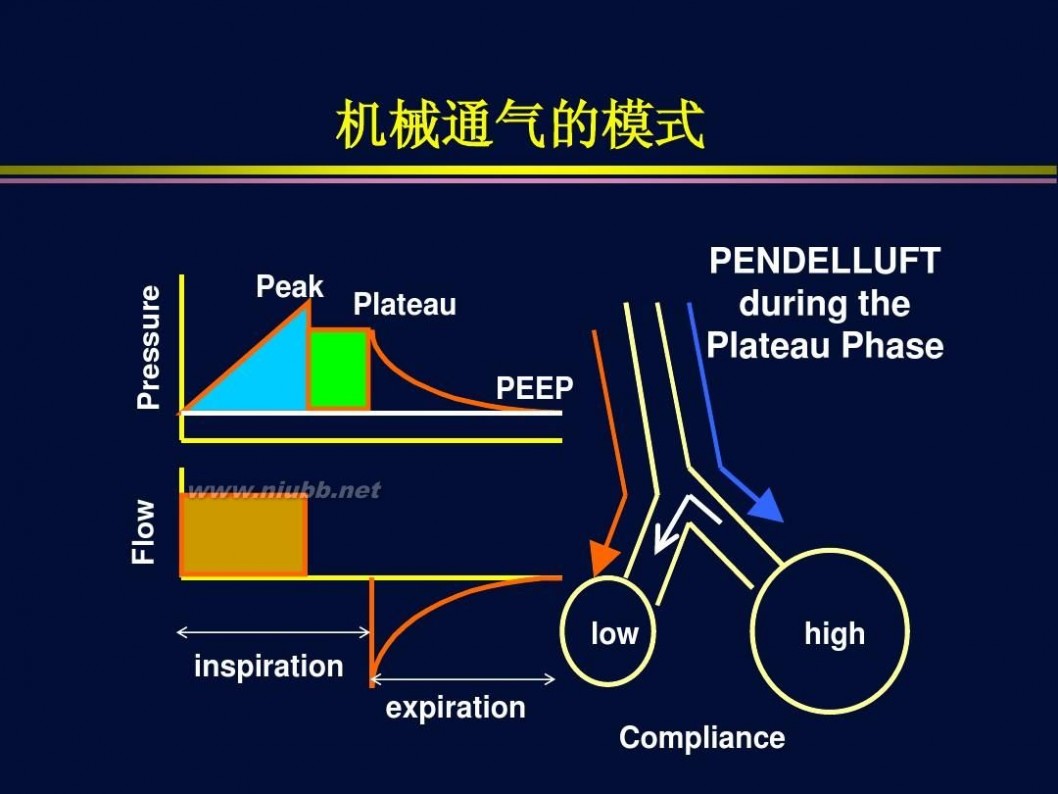
机械通气的模式
Peak
Pressure
Plateau PEEP
PENDELLUFT during the Plateau Phase
Flow
low
inspiration expiration Compliance
high
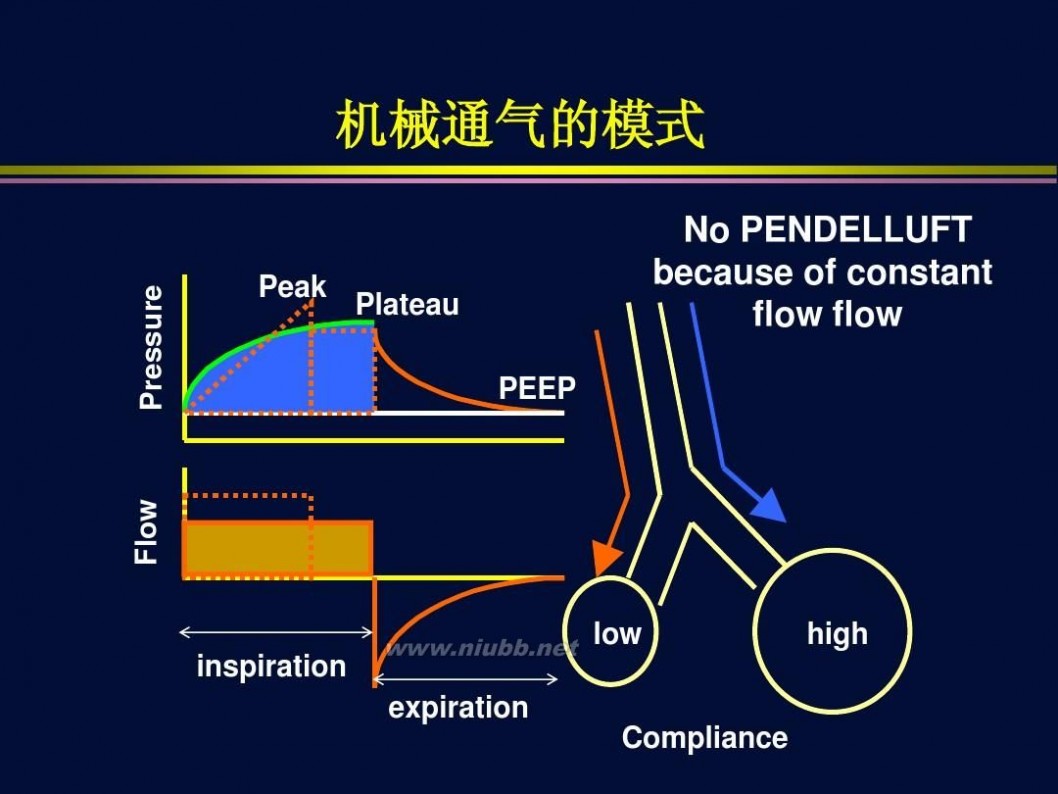
机械通气的模式
Peak
Pressure
Plateau PEEP
No PENDELLUFT because of constant flow flow
Flow
low
inspiration expiration Compliance
high
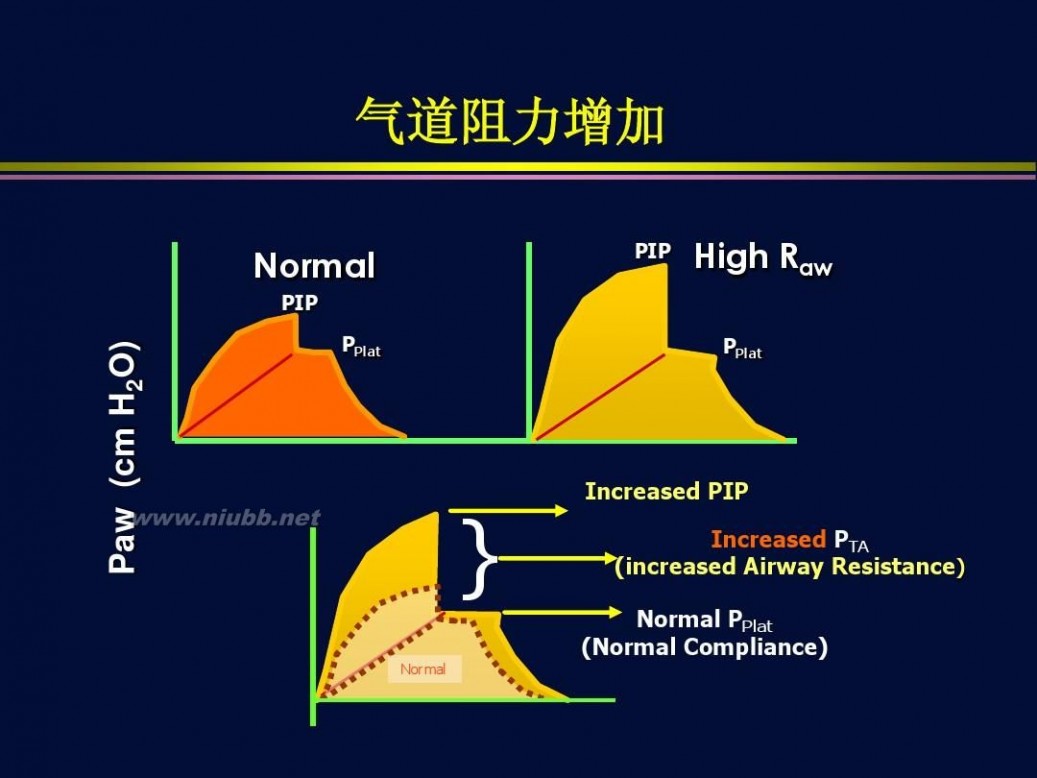
气道阻力增加
Normal
PIP PIP
High Raw
PPlat
Paw (cm H2O)
PPlat
}
Normal
Increased PIP Increased PTA (increased Airway Resistance) Normal PPlat (Normal Compliance)
导致气道阻力增加的因素
? 分泌物过多 — 分泌物潴留
? 粘膜水肿(哮喘, 气管炎, 肺水肿) ? 肺气肿(气道压迫) ? 异物 ? 肿瘤所致狭窄
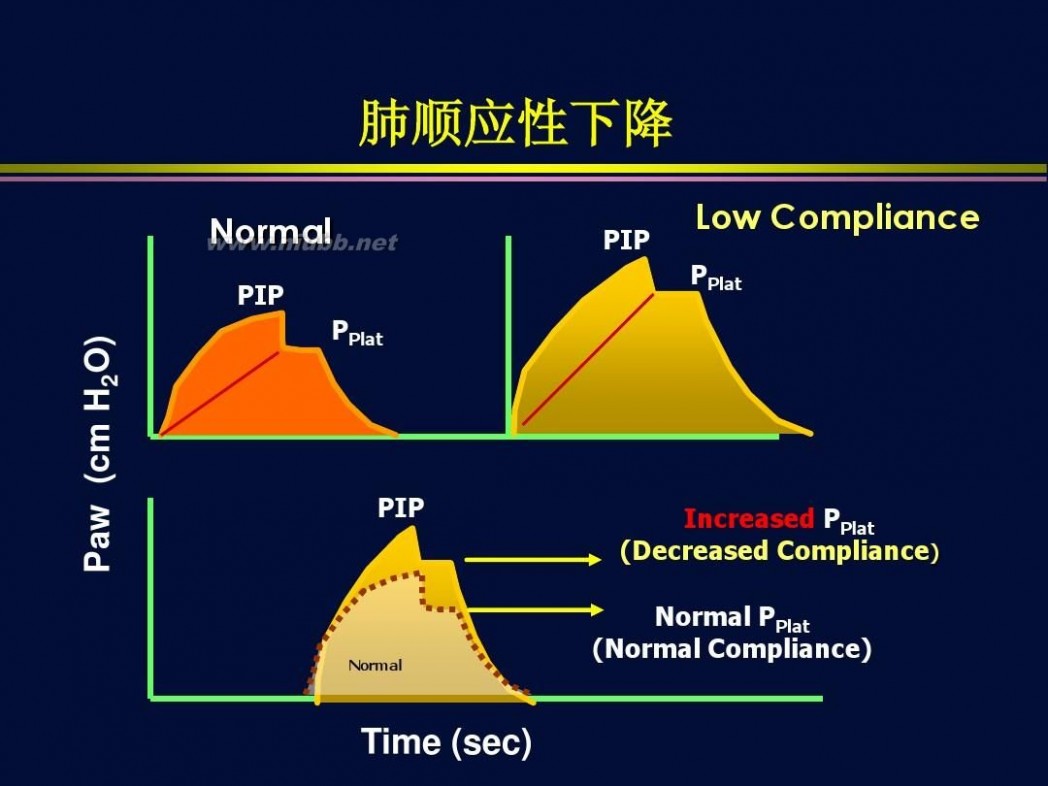
肺顺应性下降
Normal
PIP
PIP
Low Compliance
PPlat
Paw (cm H2O)61阅读
PPlat
PIP
Increased PPlat (Decreased Compliance)
Normal
Normal PPlat (Normal Compliance)
Time (sec)
导致肺顺应性下降的原因
? 肺实质改变
? ARDS, (支气管)肺炎, 肺水肿, 纤维化
? 表面活性物质功能障碍
? ARDS, 肺泡肺水肿, 肺不张, 误吸
? 肺容量减少
? 气胸, 膈肌抬高
吸气触发的方式及设置
? 压力触发(pressure trigger)
? 流量触发(flow trigger)
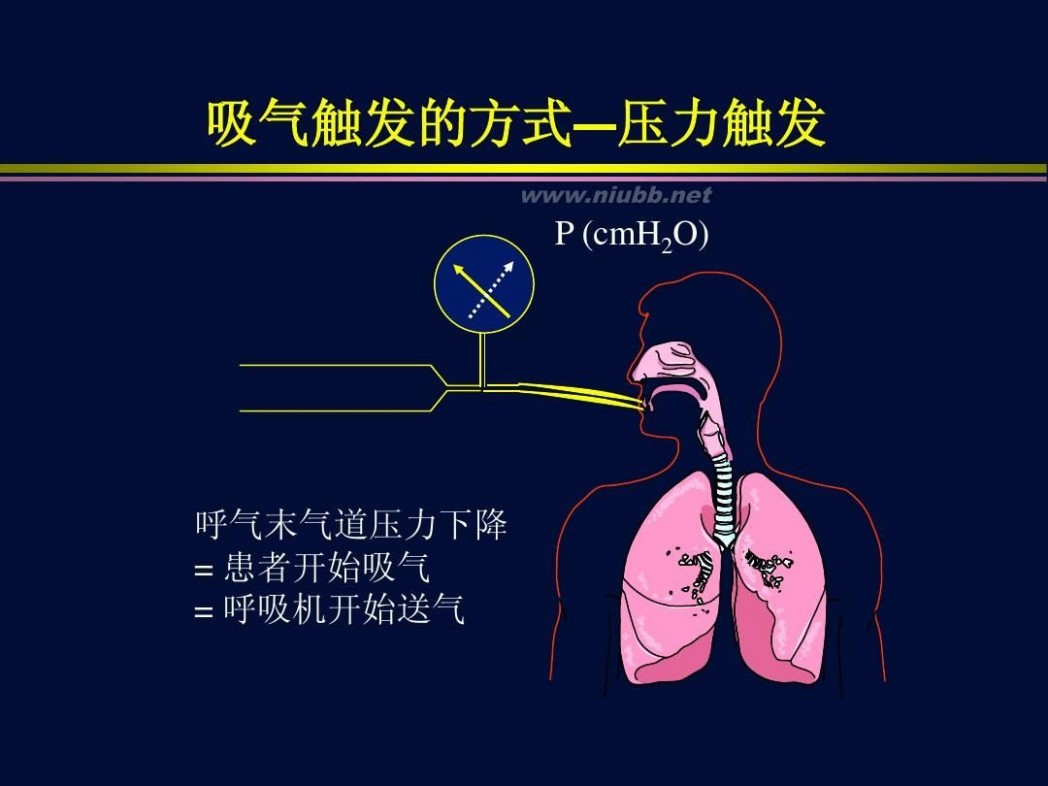
吸气触发的方式—压力触发
P (cmH2O)
呼气末气道压力下降 = 患者开始吸气 = 呼吸机开始送气
吸气触发的方式—压力触发
压力触发灵敏度的设置 ? 指气道压力较PEEP下降的水平
? 0 – 20 cmH2O
? 例如
? PEEP = 0 (10)
? Trigger sensitivity = -2
? 即气道压力为-2 (8) cmH2O时呼吸机开始送气
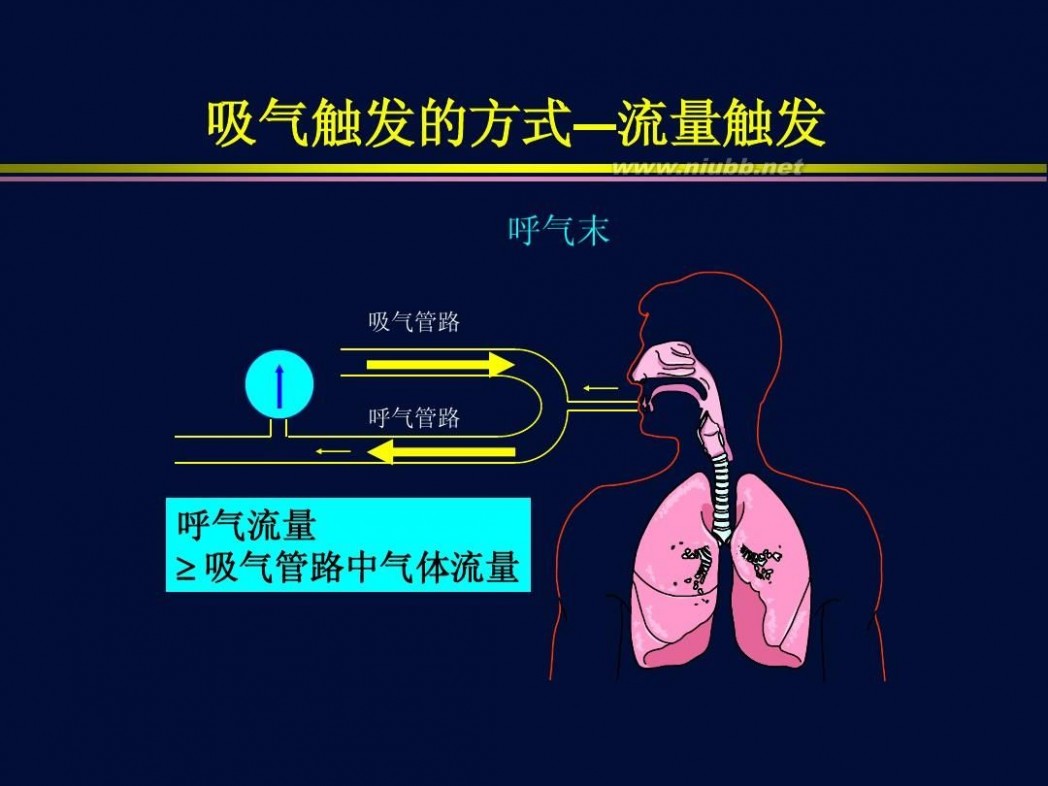
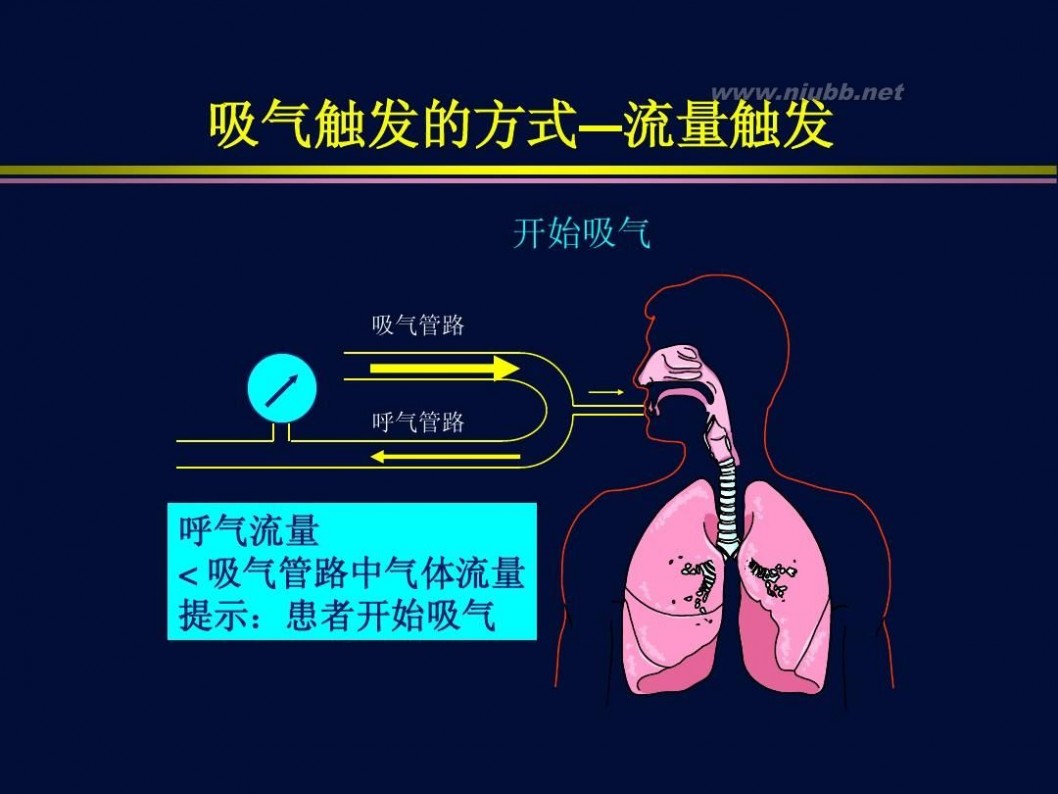
吸气触发的方式—流量触发
呼气末
吸气管路
呼气管路
呼气流量 ? 吸气管路中气体流量
吸气触发的方式—流量触发
开始吸气
吸气管路
呼气管路
呼气流量 < 吸气管路中气体流量 提示:患者开始吸气
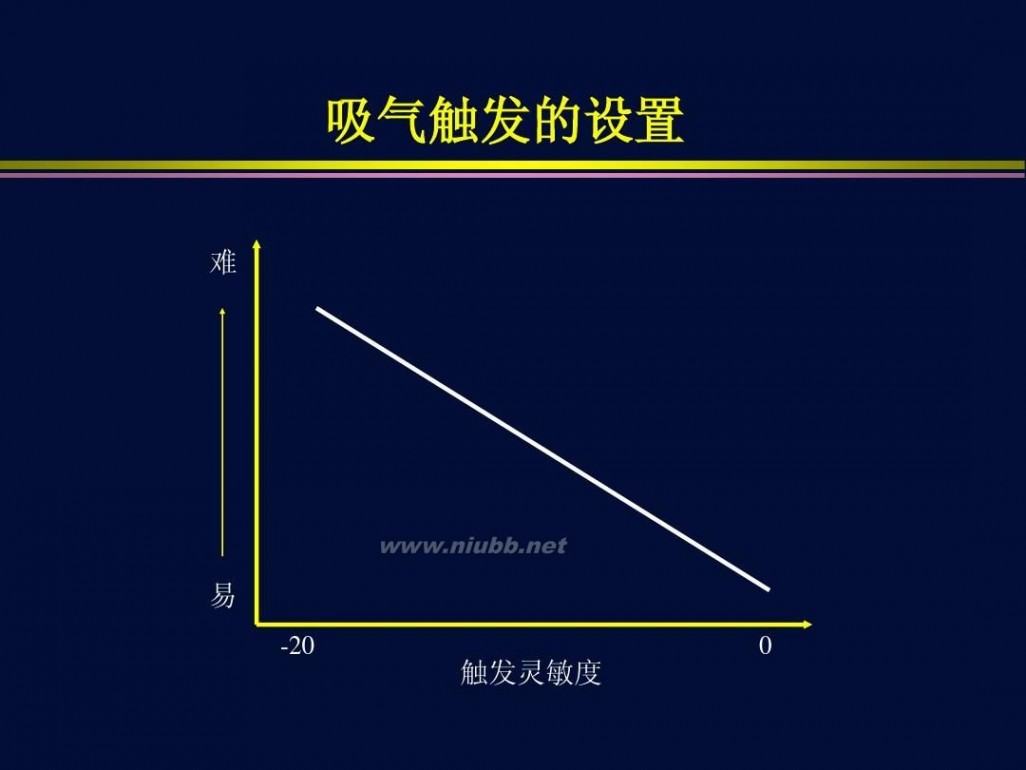
吸气触发的设置
难
易
-20
触发灵敏度
0
吸气触发的设置
? 压力触发
? -1 to -2 cmH2O
? 流量触发
? -1 to -3 lpm
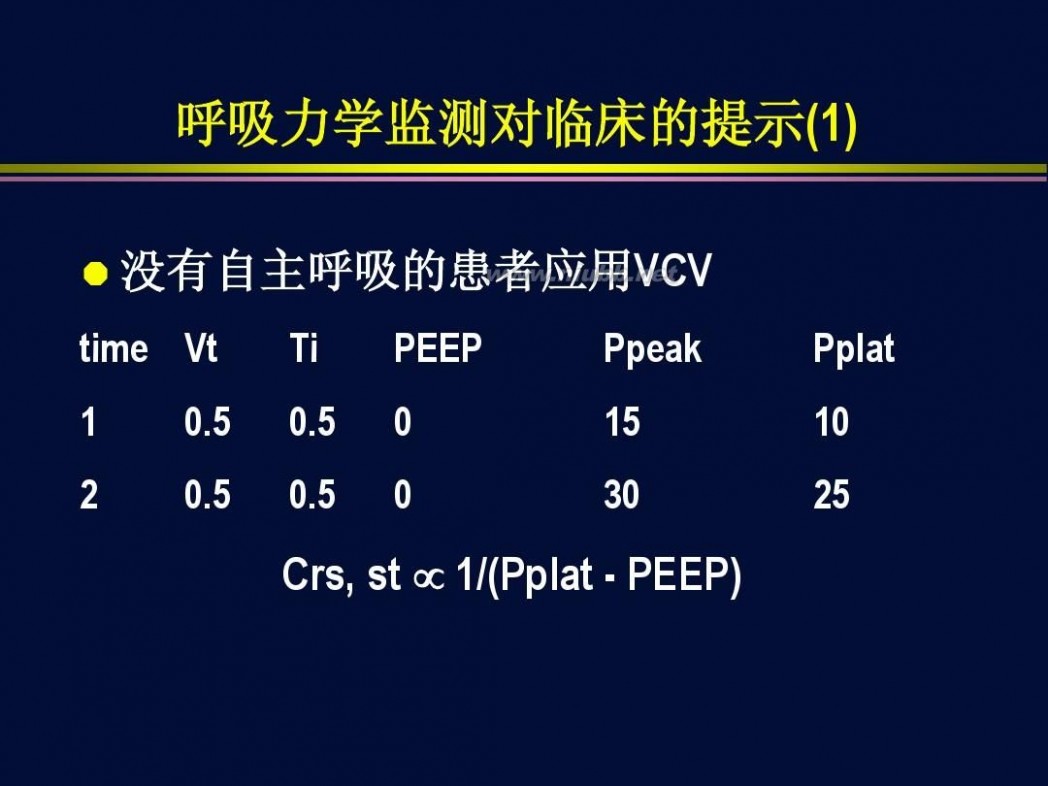
呼吸力学监测对临床的提示(1)
? 没有自主呼吸的患者应用VCV
time Vt
Ti
PEEP
Ppeak
Pplat
1
2
0.5
0.5
0.5
0.5
0
0
15
30
10
25
Crs, st ? 1/(Pplat - PEEP)
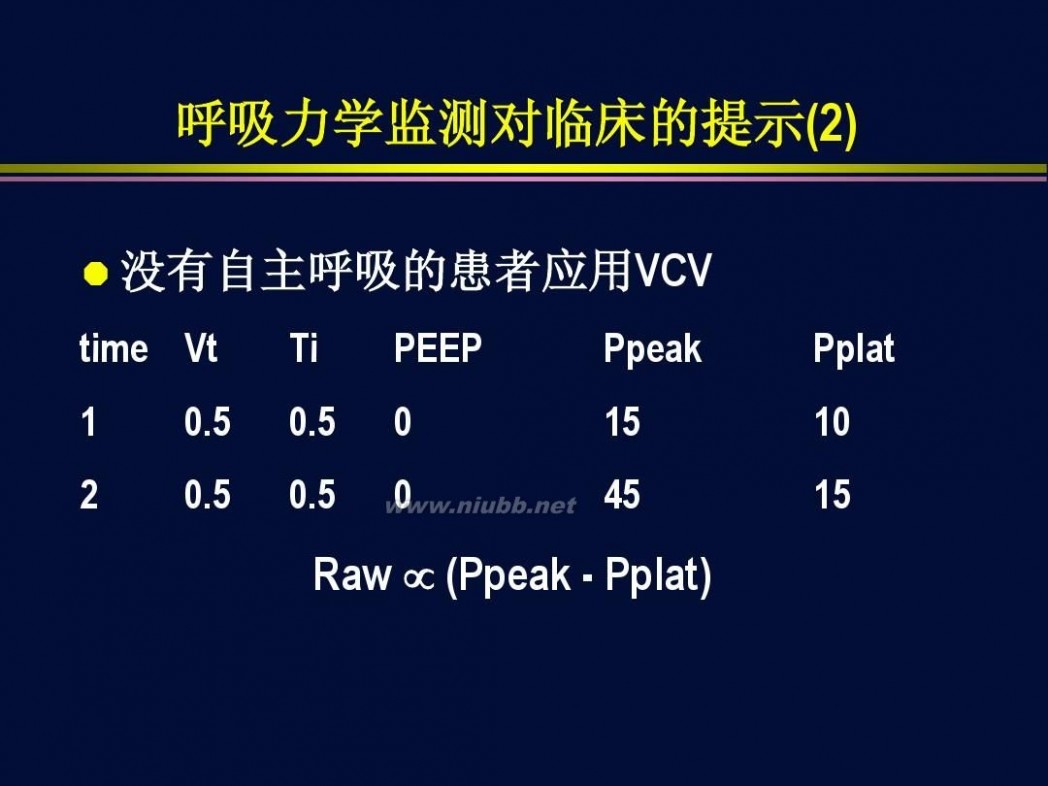
呼吸力学监测对临床的提示(2)
? 没有自主呼吸的患者应用VCV
time Vt
T-牛宝宝日记本-i
PEEP
Ppeak
Pplat
1
2
0.5
0.5
0.5
0.5
0
0
15
45
10
15
Raw ? (Ppeak - Pplat)
机械通气的模式 – 定容通气(VCV)
? 潮气量恒定
? 气道压力不恒定
? Pplat ? Ppeak-Pplat
Crs,st, Vt, 吸气力量 气道阻力, 吸气流量
? 气体分布存在的问题
? 人机对抗
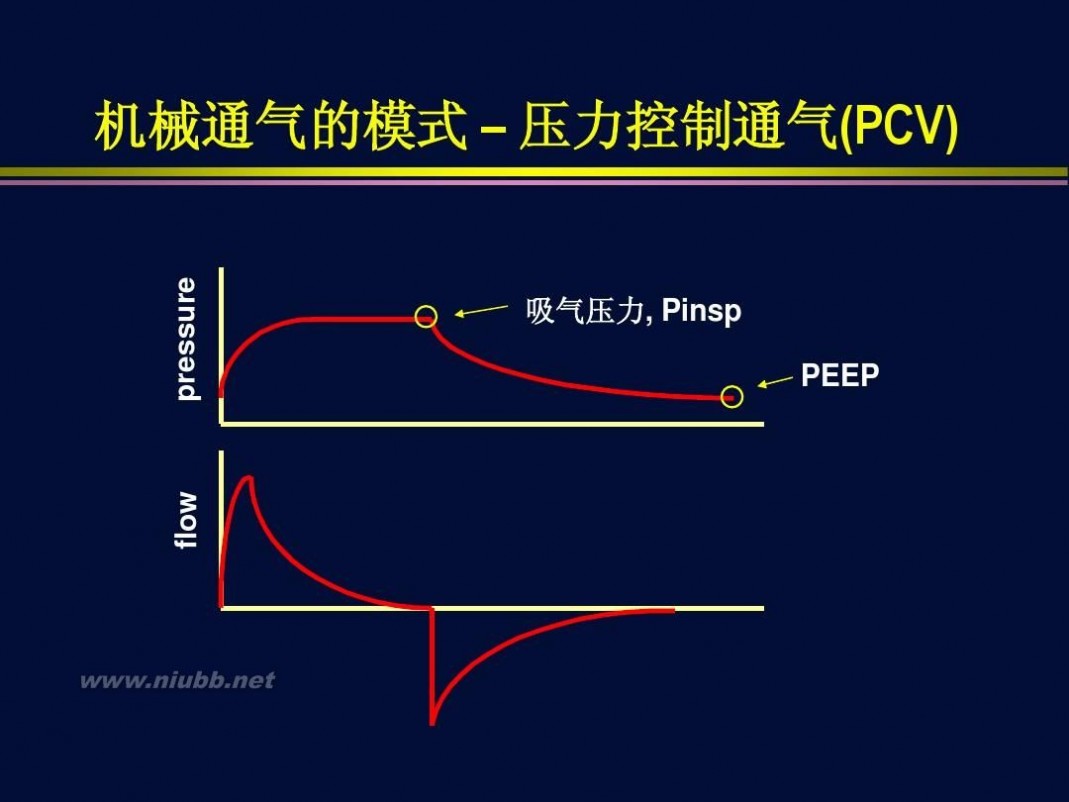
机械通气的模式 – 压力控制通气(PCV)
pressure
吸气压力, Pinsp
PEEP
flow
压力上升时间
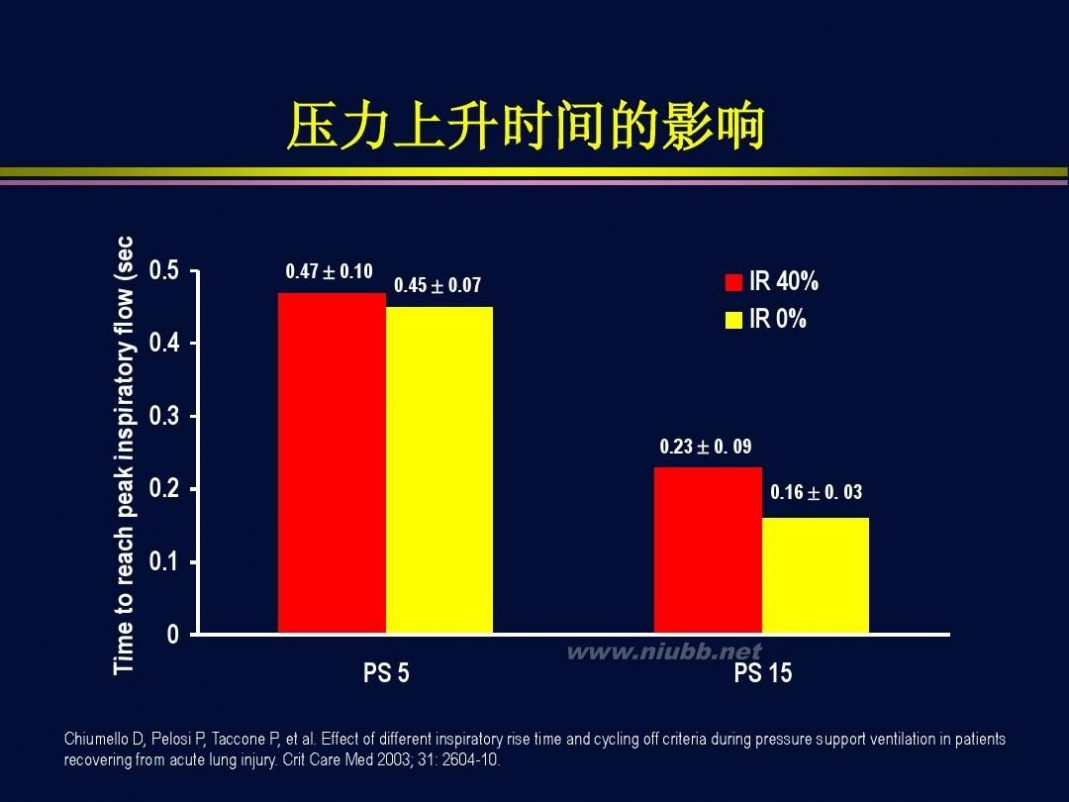
压力上升时间的影响
Time to reach peak inspiratory flow (sec)
0.5 0.4 0.3
0.47 ? 0.10
0.45 ? 0.07
IR 40% IR 0%
0.23 ? 0. 09
0.2 0.1 0 PS 5
0.16 ? 0. 03
PS 15
Chiumello D, Pelosi P, Taccone P, et al. Effect of different inspiratory rise time and cycling off criteria during pressure support ventilation in patients recovering from acute lung injury. Crit Care Med 2003; 31: 2604-10.
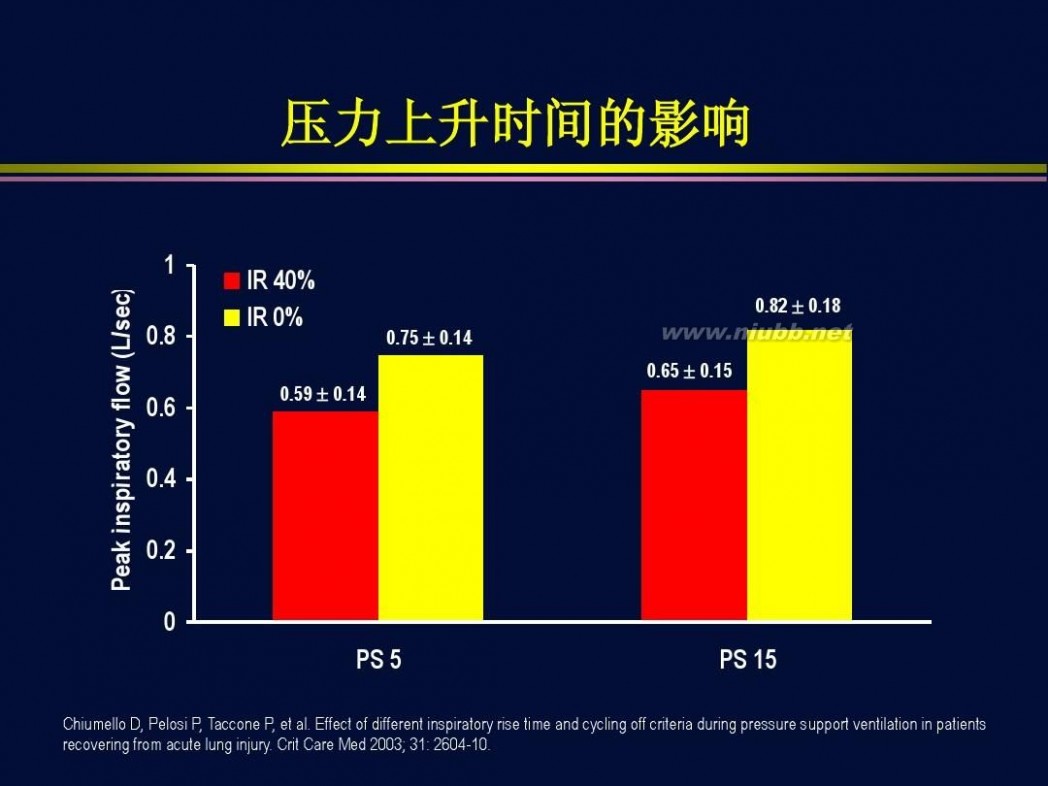
压力上升时间的影响
1
Peak inspiratory flow (L/sec)
0.8 0.6 0.4 0.2 0
IR 40% IR 0%
0.59 ? 0.14
0.82 ? 0.18 0.75 ? 0.14 0.65 ? 0.15
PS 5
PS 15
Chiumello D, Pelosi P, Taccone P, et al. Effect of different inspiratory rise time and cycling off criteria during pressure support ventilation in patients recovering from acute lung injury. Crit Care Med 2003; 31: 2604-10.
压力上升时间的影响
1 0.8
WOBiL (J/L)
0.77 0.56
IR 40% IR 0%
0.6 0.4
0.24 0.2 0 PS 5 PS 15 0.08
Chiumello D, Pelosi P, Taccone P, et al. Effect of different inspiratory rise time and cycling off criteria during pressure support ventilation in patients recovering from acute lung injury. Crit Care Med 2003; 31: 2604-10.
机械通气的模式 – 压力控制通气(PCV)
? 吸气压力恒定—气道峰压降低
? 潮气量不恒定
? 吸气压力, Crs,st, Raw
? 吸气流量符合生理特征, 有利于气体分布
? 减少通气较好的快反应肺泡发生过度充气
? 改善气体交换
? 可以代偿一定程度的漏气
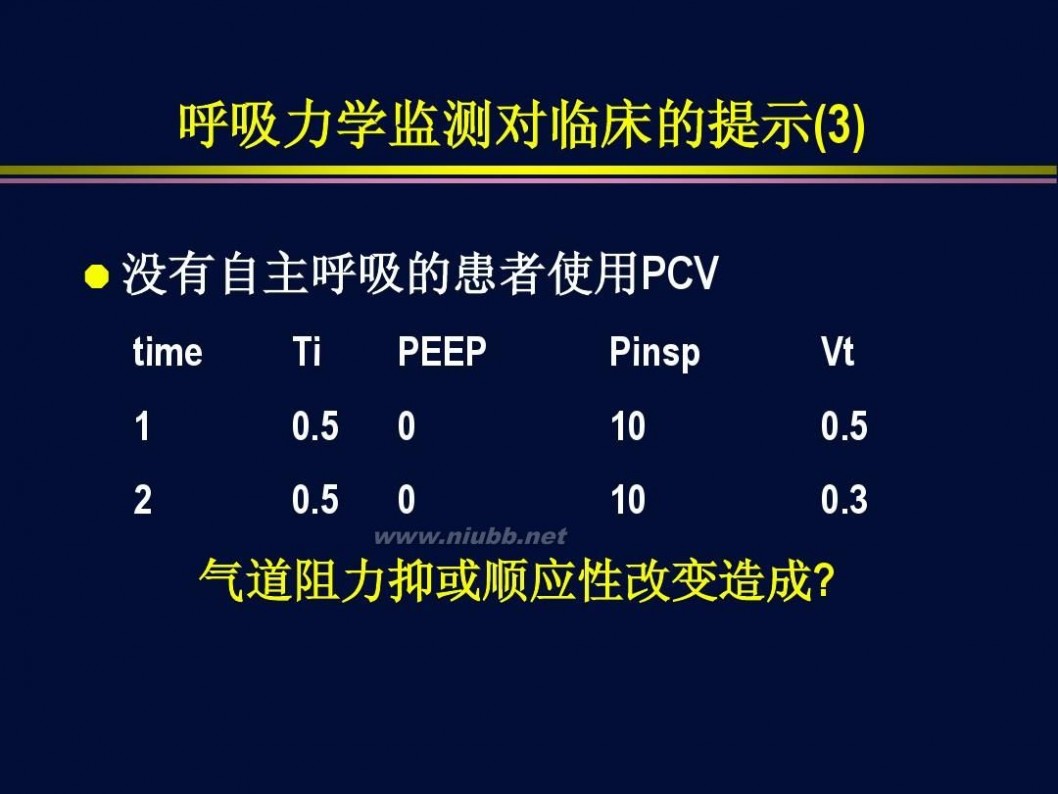
呼吸力学监测对临床的提示(3)
? 没有自主呼吸的患者使用PCV
time
Ti
PEEP
Pinsp
Vt
1
2
0.5
0.5
0
0
10
10
0.5
0.3
气道阻力抑或顺应性改变造成?
机械通气的模式 – 压力支持通气(PSV)
pressure Inspiratory Pressure, Pinsp
吸气触发
PEEP
flow
呼气触发
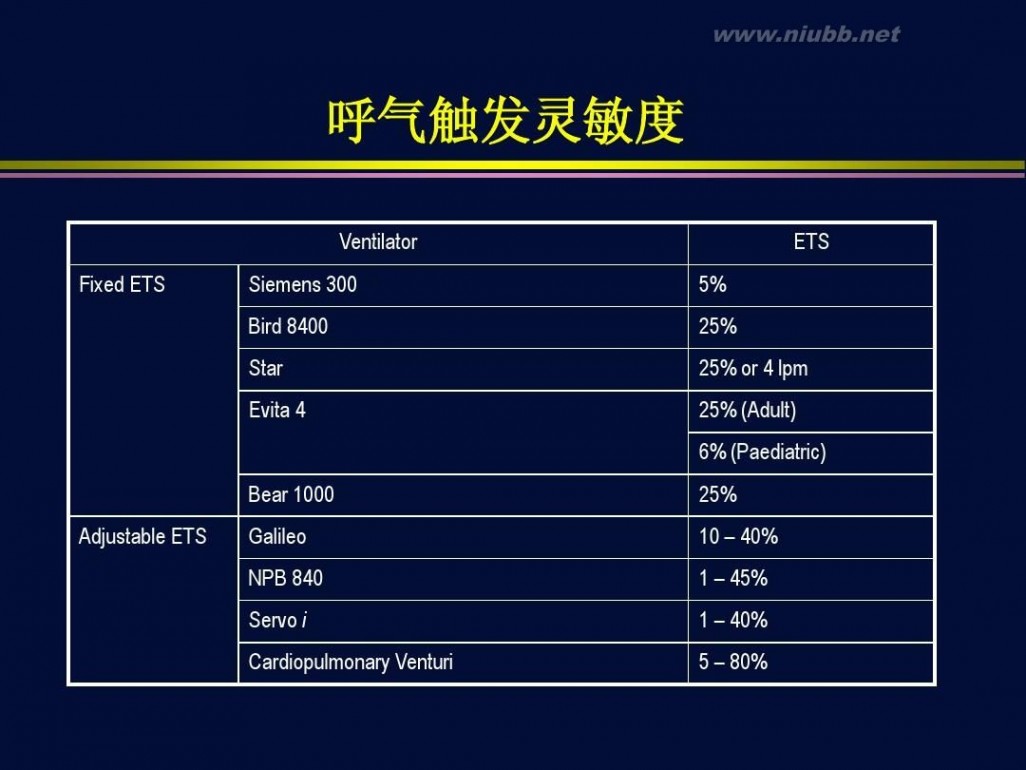
呼气触发灵敏度
Ventilator Fixed ETS Siemens 300 Bird 8400 Star Evita 4 5% 25% 25% or 4 lpm 25% (Adult) 6% (Paediatric) Bear 1000 Adjustable ETS Galileo 25% 10 – 40% ETS
NPB 840
Servo i Cardiopulmonary Venturi
1 – 45%
1 – 40% 5 – 80%
呼气触发灵敏度
吸气峰流量
45% 25% 15%
Tinsp
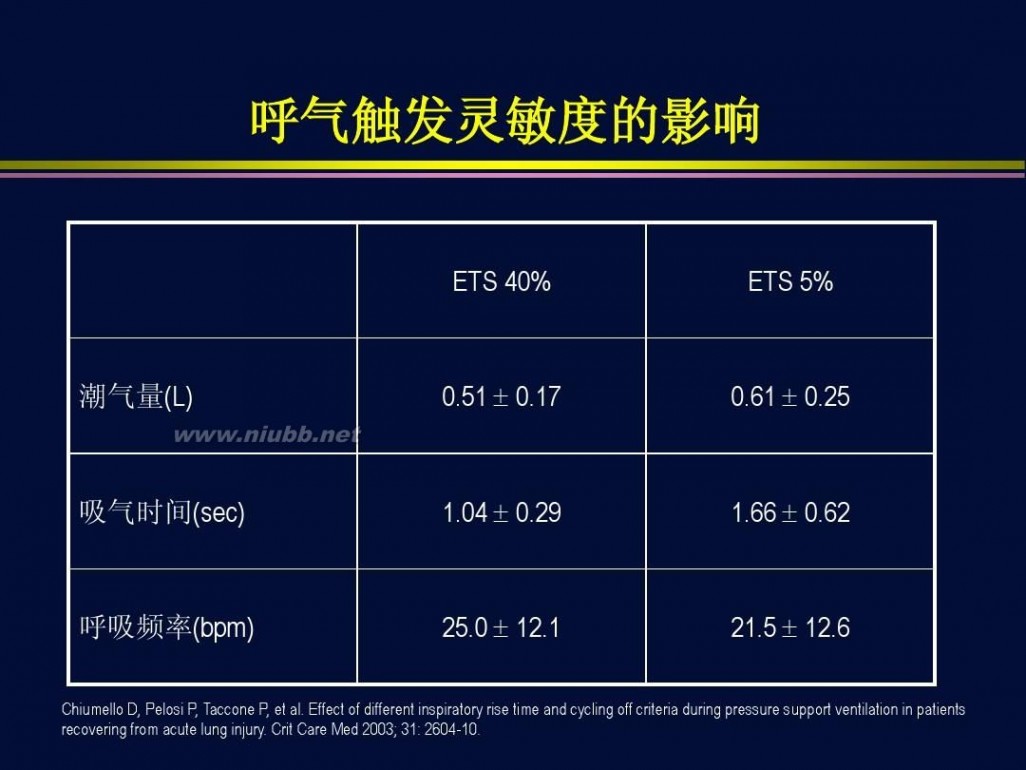
呼气触发灵敏度的影响
ETS 40% ETS 5%
潮气量(L)
0.51 ? 0.17
0.61 ? 0.25
吸气时间(sec)
1.04 ? 0.29
1.66 ? 0.62
呼吸频率(bpm)
25.0 ? 12.1
21.5 ? 12.6
Chiumello D,
Pelosi P, Taccone P, et al. Effect of different inspiratory rise time and cycling off criteria during pressure support ventilation in patients recovering from acute lung injury. Crit Care Med 2003; 31: 2604-10.
机械通气的http://www.61k.com模式 – 压力支持通气(PSV)
? 患者触发
? 吸气流量依赖于预设的吸气压力 ? 吸气流量下降到峰流量的25%以下, 吸气
即终止 ? 潮气量在一定程度上由患者的吸气力量 决定
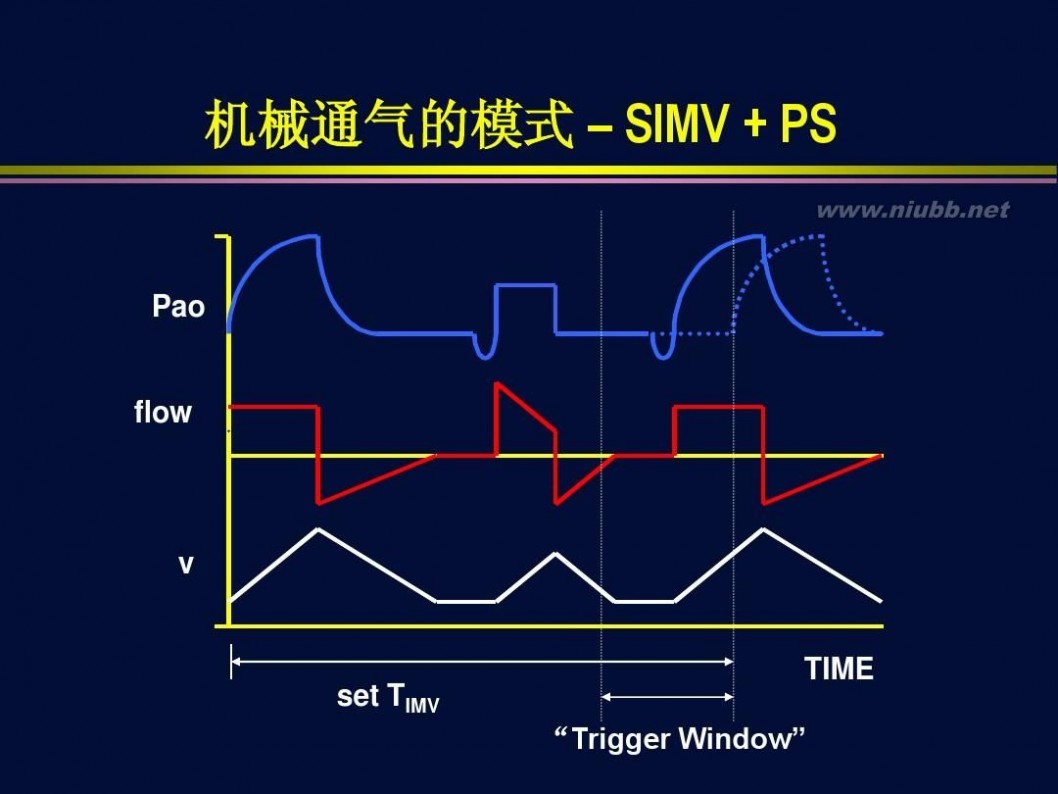
机械通气的模式 – SIMV + PS
Pao
flow
v
set TIMV
TIME “Trigger Window”
机械通气的模式
SIMV触发窗的确定
? 设定的SIMV周期TIMV的后25%
? 设定的TIMV =
60/SIMV频率
触发窗 = 60/CMV频率
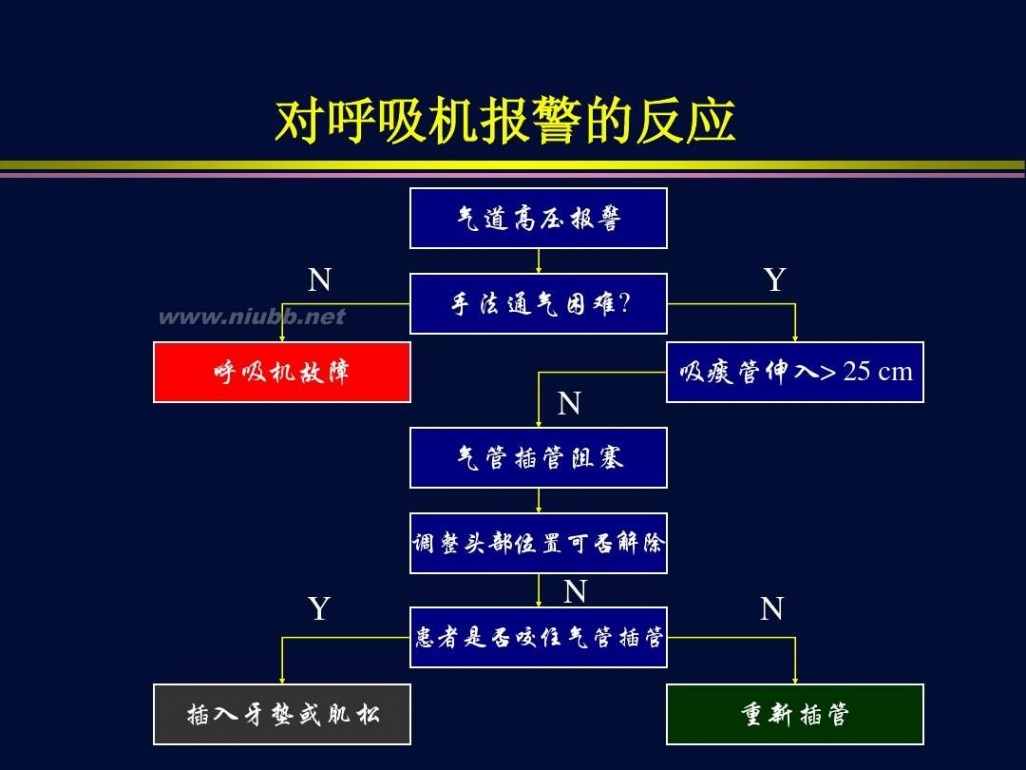
对呼吸机报警的反应
气道高压报警
N
呼吸机故障
手法通气困难?
Y
吸痰管伸入> 25 cm
N
气管插管阻塞
调整头部位置可否解除
Y
插入牙垫或肌松
N
患者是否咬住气管插管
N
重新插管
对呼吸机报警的反应
气道高压报警
N
呼吸机故障
手法通气困难?
Y
吸痰管伸入> 25 cm
Y
镇静肌松
Y
呼吸肌费力
顺利进行通气
N
体检及胸片
寻找呼吸窘迫的原因 低血容量,CO2潴留 休克,CNS病变
气 胸 肺不张 实 变
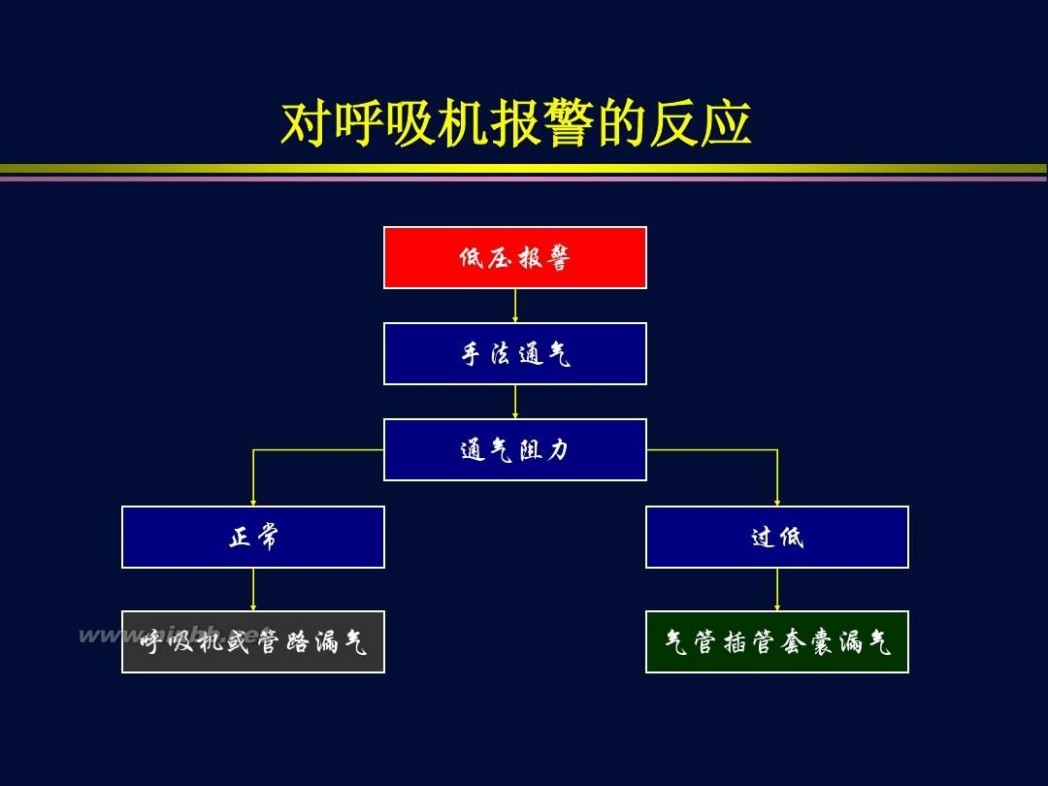
对呼吸机报警的反应
低压报警 手法通气 通气阻力
正常
过低
呼吸机或管路漏气
气管插管套囊漏气
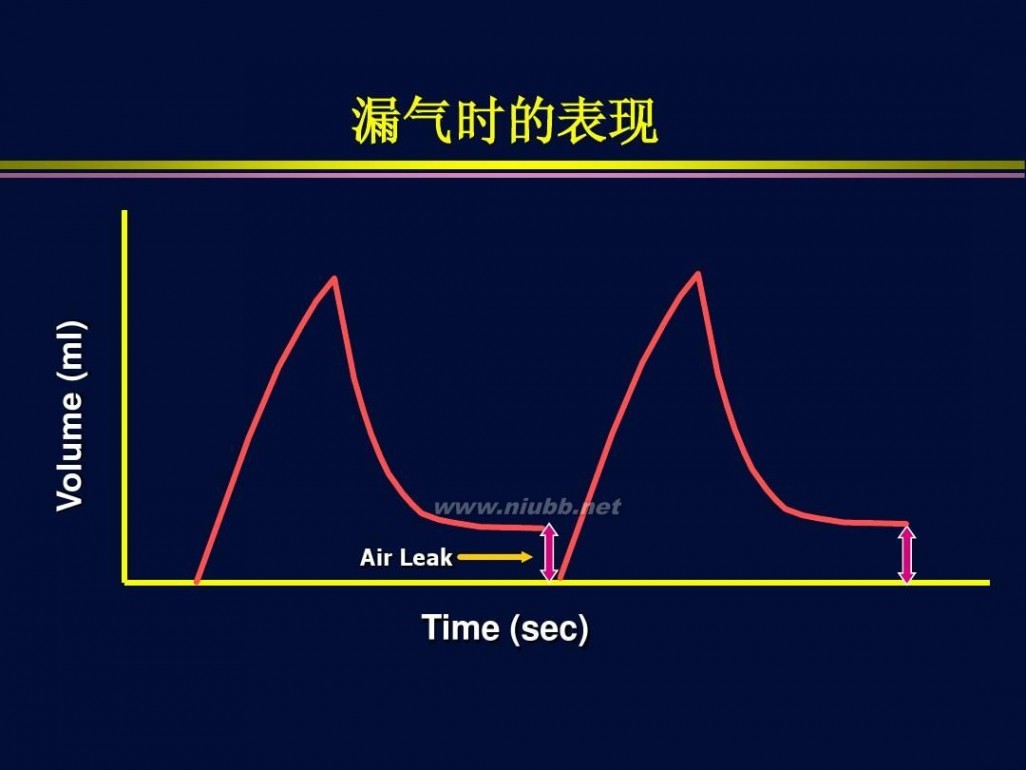
漏气时的表现
Volume (ml)
Air Leak
Time (sec)
对呼吸机报警的反应
气道低压报警 ? 呼吸机工作异常 ? 漏气
? ? ? ? ?
呼吸机内部 吸气回路 Y管与气管插管连接处 气管插管套囊周围 支气管胸膜瘘
?
患者吸气力量过强
二 : 气动机械手
组员:李宇齐,赵宇轩,彭上,陈石,何翔宇
气动机械手现状及发展前景
1.1概述
机械手是能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。(www.61k.com]机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。按驱动方式可分为液压式、气动式、电动式、机械式。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
我组报告的方向为气动机械手。气动机械手是随着现代气动技术、气动伺服控制技术和以计算机技术为核心的控制技术的飞速进步而发展起来的,它代表着现代气动技术发展的成就和方向。气动机械手是典型
的机、电、气一体化的产物,
以其价廉、简单、维护方便、
抗污染能力强等优点,在工业
自动化领域中得到愈来愈广
泛的应用。
气动技术(Pneumatics)
是以空气压缩机为动力源,以
压缩空气为工作介质,进行能
量传递或信号传递的工程技
术,是实现各种生产控制、自
动控制的重要手段之一。作为
流体传动的一个重要分支,气动技术成为独立的技术门类不过 50 多年的时间,却己经充分显示出它在自动化领域中强大的生命力,成为上个世纪及本世纪应用最广,发展最快,也是最容易被接受及重视的技术之一。

1
气动机械手 气动机械手
组员:李宇齐,赵宇轩,彭上,陈石,何翔宇
气压传动工作压力较低,运作提件简单,容易,处理方便,一般压缩空气可存贮在储气罐中,就算发生突然断电也不会导致工艺流程突然中断。[www.61k.com]
气动机械手通用性强,机械手臂采用气流负压式吸盘或是夹持式,能实现手腕回转运动,按照抓取工件的要求,手臂有三个自由度,即手臂的伸缩、左右回转、和上下升降运动。回转与升降运动是通过立柱来实现的。
横向移动为手臂的横移,手臂的各种运动都是由气缸来实现的,由于气压传动系统动作迅速、反应灵敏、阻力损失和泄漏较小,成本低廉,有一定的承载能力,在足够的工作空间以及在任意位置都能自动定位等特性。
由气动元件组成的控制系统只适用于简单工艺、小型产品,因为定位精准方面欠缺,不能在高速情况下实现高度的精准定位。
气动技术是以空气压缩机为动力源,以压缩空气为工作介质,进行能量传递或信号传递的工程技术,是实现各种生产控制、自动控制的重要手段之一。
1.2气动技术的发展历程
近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求;微电子技术的引入,促进了电气比例伺服技术的发展,现代控制理论的发展,使气动技术从开关控制进入闭环比例伺服控制,控制精度不断提高;由于气动脉宽调制技术具有结构简单、抗污染能力强和成本低廉等特点,国内外都在大力开发研究。
从各国的行业统计资料来看,近30多年来,气动行业发展很快。20世纪70年代,液压与气动元件的产值比约为9:1,而30多年后的今天,在工业技术发达的欧美、日本等国家,该比例已达到6:4,甚至接近5:5。我国的气动行业起步较晚,但发展较快。从20世纪80年代中期开始,气动元件产值的年递增率达20%以上,高于中国机械工业产值平均年递增率。随着微电子技术、PLC技术、计算机技术、传感技术和现代控制技术的发展与应用,气动技术已成为实现现代传动与控制的关键技术之一。
2
气动机械手 气动机械手
组员:李宇齐,赵宇轩,彭上,陈石,何翔宇
1.3气动机械手的发展现状
气动技术——这个被誉为工业自动化之“肌肉”的传动与控制技术,在加工制造业领域越来越受到人们的重视,并获得了广泛应用。[www.61k.com]目前,伴随着微电子技术、通信技术和自动化控制技术的迅猛发展,气动技术也不断创新,以工程实际应用为目标,得到了前所未有的发展。
另一方面,气动技术作为“廉价的自动化技术”,由于其元器件性能的不断提高,生产成本的不断降低,被广泛应用于现代工业生产领域。在现代化的成套设备与自动化生产线上,几乎都配有气动系统。据统计;在工业发达国家中,全部自动化流程中约有30%装有气动系统,有90%的包装机械,70%的铸造、焊接设备,50%的自动操作机、400/8的锻压设备和洗衣设备、30%的采煤机械,20%的纺织机械、制鞋业、木材加工、食品机械、43%的工业机器人装有气压系统。日、美、德等国的气动元件销售平均每年增长超过10-15%。许多工业发达国家的气动元件产值己接近液压元件的产值,且仍以较大速度发展。完全可以想象,类同“家用电器”,将来会出现“家用气动”这样的名词为人们熟知。
工业机器人使用最多的一种驱动方式是电机驱动。驱动电机一般采用步进电机、直流伺服电机以及交流伺服电机。由于电机速度高,通常须采用减速机构(如谐波传动、RV摆线针轮传动、齿轮传动、螺旋传动和多杆机构等)。这类机器人的特点是控制精度高,驱动力较大,响应快,信号检测、传递、处理方便,并可以采用多种灵活的控制方案。但是由于这类机器人价格昂贵,限制了在一些场合的广泛应用。因此,人们开始寻求其它一些经济适用的机器人驱动方式。
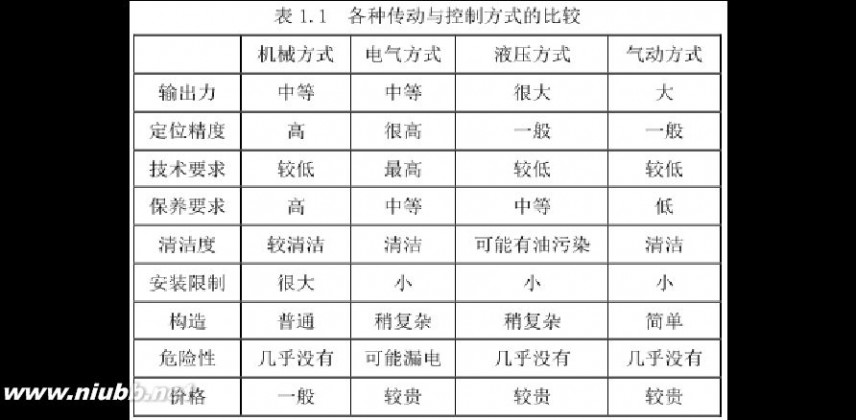
随着气动技术获得了快速发展,其中利用成本性能比低廉及同时具有许多优点的气动机械手设备来满足社会生产实践需要也越来越多的受到重视,气动机械手技术已经成为能够满足许多行业生产实践要求的一种重要实用技术。气动机械手与其它控制方式的机械手相比,具有价格低廉、结构简单、功率体积比高、无污染及抗干扰性强等特点,表1.1给出了各种控制方式的比较。
工业自动化技术发展至今,气动定位系统已由传统的两点可靠定位,发展到任意位置定位。传统的气动系统只能在两个机械调定位置可靠定位,并且其运动速度只能靠单向节流阀
3
气动机械手 气动机械手
组员:李宇齐,赵宇轩,彭上,陈石,何翔宇
单一调定的状态,经常无法满足许多设备的自动控制要求。[www.61k.com)因而电一气比例和伺服控制系统,特别是定位系统得到了越来越广泛的应用。因为采用电一气伺服定位系统可非常方便地实现多点无极定位(柔性定位)和无极调速,此外利用伺服定位气缸的运动速度连续可调性以代替传统的节流阀和气缸端部缓冲方式,可以达到最佳的速度和缓冲效果,大幅度降低气缸的动作时间,缩短工序节拍,提高生产率。
4
气动机械手 气动机械手
组员:李宇齐,赵宇轩,彭上,陈石,何翔宇
简易型精确定位气动机械手简介
2.1技术指标
(1)气动机械手采用气压驱动,气压压力为 0.25MPa。(www.61k.com]
(2)在指定行程范围内:X 方向 800mm,Y 方向 400mm,Z 方向 100mm,气动机械手 能够准确的运动并将工件移动至指定位置,实现对工件的拾放功能。该系统所传送 的工件是圆球形工件,拾放功能通过气动吸盘来实现。
(3)气动机械手能够在 X、Y 轴两坐标中任意位置实现精确定位,精度要求为 1mm 以内。Z 轴坐标实现两点上下行程位置定位。
(4)气动机械手有两种控制方式:操作面板控制和个人计算机控制,两种控制方 式均以 PLC 为主要控制模块,其中个人计算机控制要求 PLC 与上位机实现有效通讯, 通过上位机程序的改变来实现 PLC 程序的更新与运动参数的变化。
(5)系统在正常和非正常工作情况下,要求设置机构连锁保护和故障显示等安全 保护功能,在异常情况下及时报警,避免发生意外。
其基本动作流程如下


5
气动机械手 气动机械手
组员:李宇齐,赵宇轩,彭上,陈石,何翔宇
2.2机械手总体结构
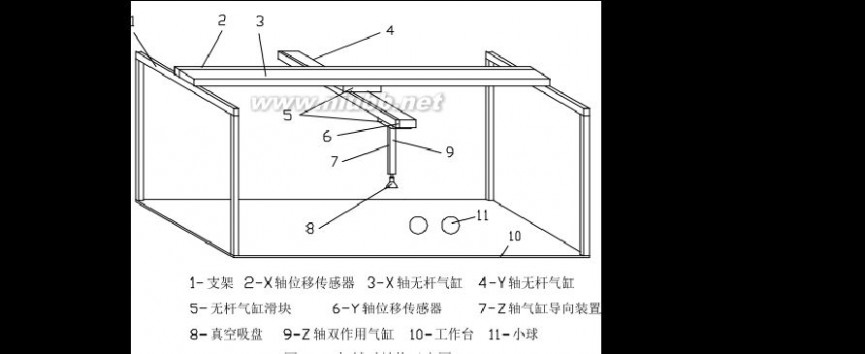
机械手采用结构方式最为简单的直角坐标式,具有三个自由度,即 X、Y、Z 轴方向自由度,机械手 Z 轴气缸活塞杆末端设置真空吸盘。(www.61k.com]机械手总体结构示意如图。
2.3气动回路的构成及原理
气动回路主要是由气源、各种控制阀以及执行气缸等组成。
(1)气源
气源是气压传动系统的动力源,是由空气压缩机产生的压缩空气。为保证气动系统正常工作,必须对压缩空气进行降温、净化、减压、稳压以及提供油雾等一系列处理,因此必须设置压缩空气净化装置,包括冷却器、油水分离器和储气罐等。为了保证空气质量,气源经过一过滤减压阀进行减压及过滤,压缩空气从过滤减压阀连通到各种控制阀并进入各气缸的两腔。
(2)换向阀
换向阀是气动控制中很重要的一类阀,用于改变气流方向和控制管道中气流的
通断,从而控制执行元件的运动方向。电磁换向阀是利用电磁力来完成阀芯移动从 而实现换向的。由于它可以实现电气联合作用,易于与 PLC 等控制设备配合,因而 应用广泛。
6
气动机械手 气动机械手
组员:李宇齐,赵宇轩,彭上,陈石,何翔宇
(3)执行机构及其它相关气动部件
执行机构包括 X 轴无杆气缸,Y 轴无杆气缸,Z 轴双作用气缸,真空发生器和真 空吸盘等部件,。(www.61k.com]气动控制回路主要由 X 轴无杆气缸回路,Y 轴无杆气缸回路,Z 轴双作用气缸回路和真空吸盘回路组成。
气动原理图
参考文献
【1】 杨振球 .简易型精确定位气动机械手的研究及其应用. 华中科技大学,2006
【2】 陈冰冰. 气动机械手的结构设计、分析及控制的研究. 东华大学,2006
【3】 陶海斌,倪俊芳. 气动机械手自动搬运控制系统的设计. 苏州大学,2012
2011级机电二班
组员:李宇齐,赵宇轩,彭上,陈石,何翔宇

7
气动机械手 气动机械手
组员:李宇齐,赵宇轩,彭上,陈石,何翔宇
2014.6
8
三 : 气动机械手的简介
气动机械手 -简介近20年来,气动技术的应用领域迅速拓宽,尤其是在各种自动化生产线上得到广泛应用。电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠;气动机械手、柔性自动生产线的迅速发展,对气动技术提出了更多更高的要求;微电子技术的引进,促进了电气比例伺服技术的发展,现代控制理论的发展,负气动技术从开关控制进进闭环比例伺服控制,控制精度不断进步;由于气动脉宽调制技术具有结构简单、抗污染能力强和本钱低廉等特点,国内外都在大力开发研究。
“www.61k.com)四 : 杜斌_机械通气
杜斌 杜斌_机械通气

杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气

杜斌 杜斌_机械通气

杜斌 杜斌_机械通气

杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气

杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气

杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气

杜斌 杜斌_机械通气

杜斌 杜斌_机械通气
杜斌 杜斌_机械通气

杜斌 杜斌_机械通气
杜斌 杜斌_机械通气

杜斌 杜斌_机械通气
杜斌 杜斌_机械通气

杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气

杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
杜斌 杜斌_机械通气
 本文标题:气动机械手-杜斌_机械通气
本文标题:气动机械手-杜斌_机械通气 61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1