一 : 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第1页
1.绪论
1.1 路灯控制概述
路灯照明是城市基础设施的组成部分,在城市的交通安全、社会治安、人民生活和市容风貌中处于举足轻重的地位,发挥着不可替代的作用,而且标志着城市实力和成熟的程度. 随着我国城市和经济的迅速发展,城市照明交通安全越来越受到人们的关注,先进的路灯控制系统成为一个现代化城市的象征。(www.61k.com]
建国以来,伴随我国城市现代化建设的突飞猛进,城市路灯照明取得了巨大的成绩,成为一项蓬勃发展的公共事业,同时为了符合节约型、可持续发展社会的标准,产生了对路灯监管改革的需求。传统的路灯照明和管理存在浪费大,路灯使用寿命短,人工作业量大,故障率高,统计查询功能弱等不足。为了解决“全夜灯”照明造成的浪费、“半夜全灭或半灭灯”带来的交通安全隐患等问题人们提出了各种方案。
有的城镇设置光电控制电路,利用光敏传感器检测光线强度的变化,控制路灯在光线不足时自动点亮、光强增大时自动关闭。这种方法存在着可靠性较低、易受干扰、灯具使用寿命短等问题。
有的地区采用分时控制的方法,根据时间来控制路灯的亮灭并调整路灯的供电电压以实现节能的目的,相较上一种策略,该方法能够有效提高系统可靠性、增强抗干扰能力并满足实际需求,但也伴随有灵活性低,不能根据具体天气、车流量调整路灯亮度的缺点。
1.2 本文方案研究
本文采用分层控制的方法,将上述两种策略结合起来,以分时控制为主、以光强控制为辅实现路灯的综合控制。
在分时控制方法中,涉及到两类时间的确定:一为路灯的开关时间;二为路灯的换档时间。其中,路灯开关时间由光照强度决定;换档时间由夜间车流量决定。
各地区由于所在经度不同,其对应位置的日出日落时间也不相同;同时由于地球的自转轴相对于地球和太阳的平面是倾斜的,加上地球公转作用,导致各地区每年的日出日落时间也不完全相同,这使得根据天文年历统计出的一个地区一年内每天的日落日出时间对将来情况的符合程度有很大偏差,根据该时间决定路
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第2页
灯的亮灭不能很好的满足实际需求,路灯的换档时间也如此。[www.61k.com]
为此,本文采用神经网络控制方法通过每天的光线强度、车流量变化实现对上述时间的预测以达到控制要求。
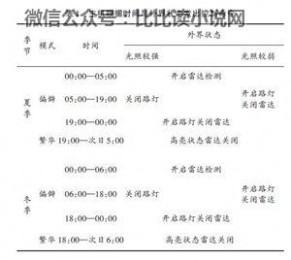
在分时控制方法中,为了节约能源还涉及到换档电压的选择:夜间交通高峰期,车流量较大,为保证足够的照度,应让路灯工作在最佳状态,此时路灯的工作电压应为其额定电压的93%。这是因为光源的寿命随着工作电压的升高而减少,当路灯工作在93%额定电压时,其寿命提高两倍,照度只降低5%。而人眼对光线的感觉与光线照度成对数关系,当光线照度减少10%时,人的视觉感觉减少还不到1%,人眼很难觉察到。所以路灯工作在额定电压的93%,既可保证照度,又可使路灯寿命大大延长,是路灯的最优工作状态。交通正常期和交通低谷期则分别将路灯工作电压控制在额定电压的88%和80%,这样既满足了交通需求又节约了能源。
在光强控制方法中,光强控制应是分时控制的补充。当由于天气等因素使交通环境出现不正常变化时,光强控制起作用;当分时控制已经工作时,光强控制应不能再启动路灯,但却应能关闭路灯。
2.路灯控制系统总体方案设计
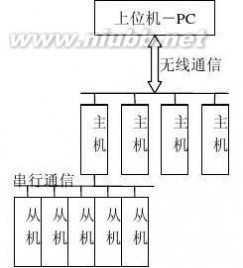
图1 系统总体结构图
本系统采用三层结构,上位机由PC服务器充当,主机由高性能单片机充当,从机由低端单片机充当。上位机安放在总控制室负责整个地区的路灯控制;主机装配在具有相同交通流的区域的控制箱内负责该区域的路灯控制;从机装配在每架路灯上负责该路灯的控制。
从机完成信息采集、路灯控制(包括分时控制和光强控制);主机通过串行
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第3页
通信与从机交换数据,接收从机采集的光强、车流量信息并通过无线网络传送到上位机,上位机根据传送来的数据采用神经网络算法预测出路灯的开关、换档时间,将其回传给主机,由主机完成将时间写入从机的工作,保证从机能够完成分时控制的功能。(www.61k.com)
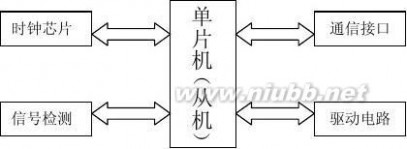
从机控制部分的结构框图如图所示:
图2 从机控制结构图
从机将主机传送来的时间数据写入时钟芯片,当定时时间到来时,时钟芯片发出中断申请,从机响应中断,触发驱动电路实现对路灯的控制;从机通过信号检测电路实时测量光线强度、车流量变化并经通信接口发送给主机,同时根据光线强度实施光强控制功能。
2.1 信号采集
在整个路灯控制系统中,信号的采集处于非常重要的地位。其中,光线强度信号应实时采集并不断送入上级系统;车流量信号应只当路灯在分时控制功能下开启后再实时采集并送往上级系统以预测夜间换档时间。
2.2 光强控制
光强控制由从机独立完成,从机根据采集到的光线强度进行判断:当光线强度连续5分钟低于标准值时启动路灯;当光线强度连续5分钟高于标准值时关闭路灯。
2.3 分时控制
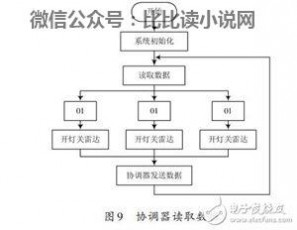
路灯控制系统应能根据时间来控制路灯亮灭并调整路灯的供电电压。系统在正常工作后,路灯开关时间由光照强度决定,换档时间由夜间车流量决定,具体时间有上位机通过神经网络预测得出,初始化阶段先根据天文年历进行预估。
本文将路灯从开到关的时间根据经验划分为三个阶段。分时控制的各个时段分配如下:
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第4页

2.4 通讯功能
串行通信部分本文采用了RS-485通讯。(www.61k.com)
传统的RS-232协议对地而言是共模传输方式,而各种电气干扰大多也是对地共模方式,尽管RS-232将信号传输电平提高到-12~+12 V,但抗干扰能力仍不理想。使得RS-232传输速率慢,传输距离短,传输信号易受外界的干扰。
RS-485是工业界使用最为广泛的双向、平衡传输线标准接口,它以半双工方式通信, 采用差模信号传输方式,与地电平关系不大,因而它抗干扰的能力比RS-232强得多,即便在信号电压比较小的情况下也能获得稳定的传输。支持多点连接,允许创建多达32个节点的网络,具有传输距离远(最大传输距离为1200m),传输速率快(1 200m时为100 kbit/s)等优点,用于多站互连时,便于组建成本低廉、可靠性高及分布范围较广的总线网络。
由于RS-485总线是一种异步半双工的通信总线,在某一时刻,总线只可能呈现出一种工作状态,为此,在由单片机构成的多机通信系统中,一般采用主从式通信。主机处于主导和支配地位,发出控制命令后等待从机的应答。各从机处于侦听状态,不能主动往总线发送数据,必须等待主机的命令,在接收到地址帧后,立即判断是否在呼叫自己,如果不是则不予理睬。如果是则继续接收下面的数据。接收完一个主机控制命令后先进行校验,如果校验正确则解析接收的控制命令,并根据命令回送相应的应答帧。整个系统在任何时刻都只能有一个单片机处于发送状态,且当主机发送时所有单片机必须都处于接收状态。
3.路灯控制系统硬件模块设计
3.1 信号采集模块设计
路灯控制系统中用到的信号包括光线强度和车流量。本文主要针对光线强度信号进行采集。
在实际应用中,所需的光线强度信号是纯自然光线,因此在采集过程中要避免路灯光线对它的影响。故可以将传感器安装在路灯的正上方以尽量减小路灯开启时对数据采集的影响。本文采用光敏传感器实现将光线信号转变为模拟量电压信号,然后通过AD转换,将模拟量转换成数字量送入从机单片机。硬件连接图如
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第5页
图所示:
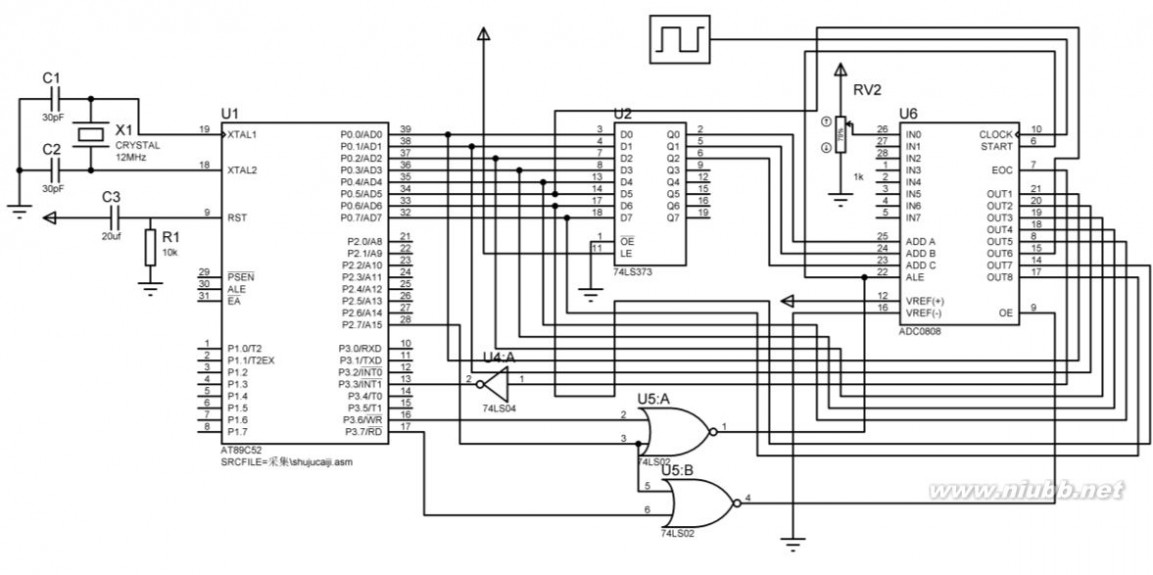
图3 信号采集硬件图
所选AD转换器为ADC0808。(www.61k.com]由于ADC0808具有输出三态锁存器,数据输出引脚可直接与数据总线相连,地址译码引脚A、B、C分别与地址总线Q0、Q1、Q2相连,以选通IN0~IN7中的一个通道。将P2.7作为片选信号,将ALE和START连在一起,由单片机的写信号/WR和P2.7控制ADC的地址锁存和转换启动。则在ADC0808锁存通道地址的同时,会启动AD转换。在读取转换结果时,用低电平的读信号/RD和P2.7引脚经或非门后,产生的正脉冲作为OE信号,用以打开三态输出锁存器,读出数据。为此将P2.7设置为低电平。另外单片机要通过检测EOC引脚来确定转换是否结束,因此须将EOC引脚与单片机的一个输出引脚相连,又由于EOC引脚高电平有效而单片机复位时所有端口都被置1,故将EOC通过一个非门与P3.3相连,则在转换结束时可以通过P3.3引脚得知。
3.2 光强控制模块设计
在路灯控制系统中,由于分时控制处于主导,所以当光强控制模块决定触发路灯时,因先进行路灯运行状态的检测,当路灯已经由分时控制触发时,光控模块不起作用;相反,当光控模块决定关闭路灯时,则不必进行路灯状态检测,可直接关闭路灯。这一逻辑判断由软件编程来实现。
单片机的引脚输出的是5V的TTL电平,不足以驱动大功率器件工作,所以需外接驱动电路。本文采用继电器来实现。硬件连接图如图所示:
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第6页
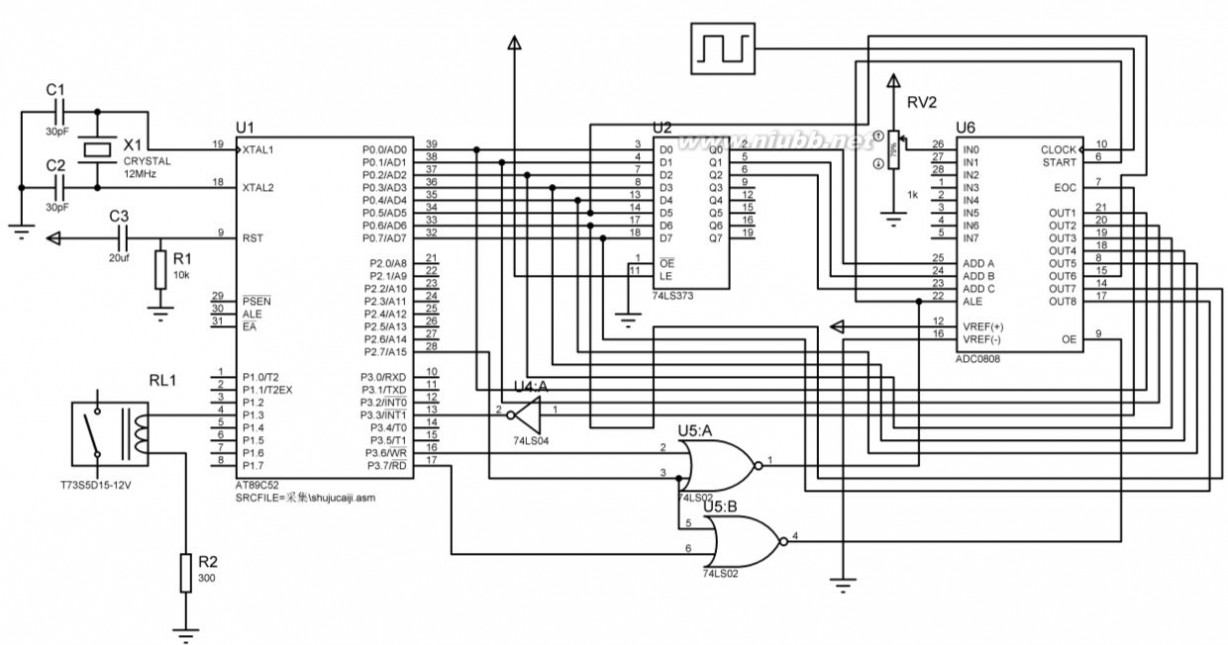
图4 光强控制硬件图
单片机实时采集光线信号并对信号进行判断。(www.61k.com]当光线强度连续5分钟低于设定值且路灯处于关闭状态时,光控模块工作,打开路灯并让路灯以88%额定电压即第二档工作状态工作,这样既能满足需求又节约了能源;当光线强度连续5分钟高于设定值时,光控模块工作对路灯进行一次关操作这样可以保证路灯可靠关闭。
当光控模块决定对路灯进行控制时,通过改变单片机引脚的状态来控制继电器线圈的通断电进而控制继电器开关的导通与断开,实现弱电控制强电。
3.3 分时控制模块设计
从机单片机在实现分时控制时需要时间序列表,该表由上位机通过神经网络预测得出,再由主机单片机通过串行通信传送给从机。在分时控制模块中,时钟芯片的选取非常重要:一方面该芯片应能提供与北京时间同步或维持在一定误差范围内的时间;另一方面该芯片应具有定时报警功能。其硬件连接图如图所示:
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第7页
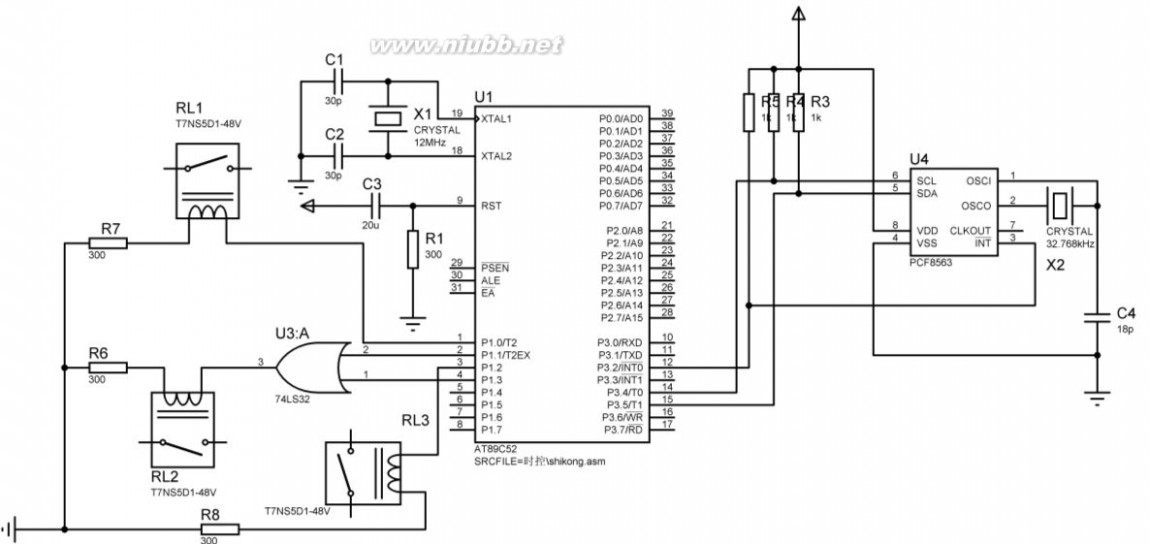
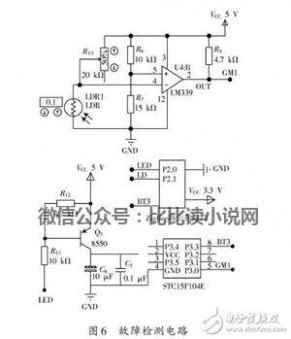
图5 分时控制硬件图
本文中,时钟芯片选用PCF8563。(www.61k.com]PCF8563是低功耗的CMOS实时时钟/日历芯片,它提供一个可编程时钟输出,一个中断输出和掉电检测器,所有的地址和数据通过I2C总线接口串行传递。最大总线速度为400Kbits/s。PCF8563 有16 个8位寄存器:前两个寄存器(内存地址00H,01H)是控制寄存器和状态寄存器,内存地址02H~08H 用于时钟计数器(秒~年计数器),地址09H~0CH 用于报警寄存器(定义报警条件)。秒、分钟、小时、日、月、年、分钟报警、小时报警、日报警寄存器,编码格式为BCD,星期和星期报警寄存器不以BCD 格式编码。当报警寄存器中的AE位清0时,相应的报警条件有效,这样,一个报警将在每分钟至每星期范围内产生一次。标志位AIE决定一个中断的请求有效或无效。设置报警标志位AF(控制/状态寄存器2的位3)用于产生中断,AF 只可以用软件清除。当AIE=1时报警中断有效,此时若AF也为“1”,则/INT发出中断请求。PCF8563的管脚分配如下:
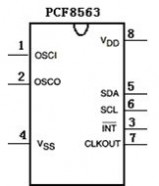
图6 PCF8563管脚分配图
OSCI为振荡器输入、OSCO为振荡器输出、/INT 为中断输出(开漏;低电平有
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第8页
效)、SDA为串行数据I/O、SCL为串行时钟输入。(www.61k.com]
与光控模块相同,分时控制模块也是通过改变单片机引脚的状态来控制继电器线圈的通断电进而控制继电器开关的导通与关断,实现弱电控制强电。分时控制模块中涉及到换档问题所以要用到三个继电器,同时由于光强控制模块中也用到一个继电器,且当它工作时是处于第二档,所以将它们结合起来通过一个或门连接。
3.4 档位调节设计
为了符合节约型、可持续发展社会的标准,路灯在设计时应考虑节能问题。所以在设计路灯控制系统时为路灯划分了三个工作状态。第一档状态下,路灯工作在93%额定电压;第二档状态下,路灯工作在88%额定电压;第三档状态下,路灯工作在80%额定电压,这样既满足了交通需求又节约了能源。其硬件连接图如图所示:
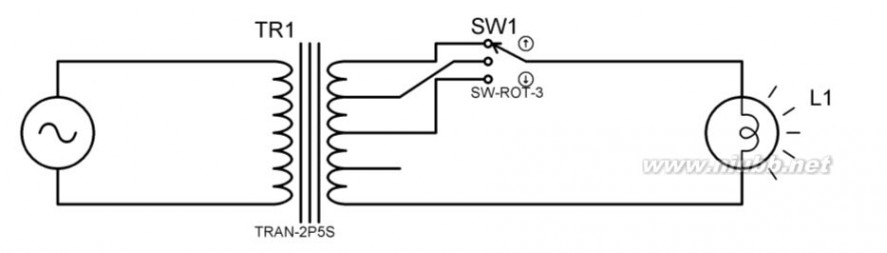
图7 档位调节硬件图
图中的开关由继电器控制。其中,光强控制下的路灯也工作在第二档状态。
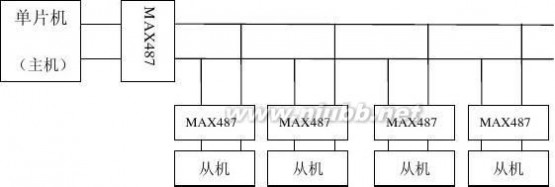
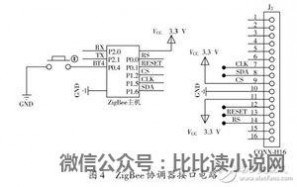
3.5 通信模块设计
路灯控制系统中涉及到无线与串行两类通信形式,本文只针对串行通信部分进行设计。结构框图如下所示:
图8 多机通信结构图
在多机通信系统的设计中,本文仅对有一台主机和一台从机的系统进行分析。其硬件连接图如图所示:
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第9页
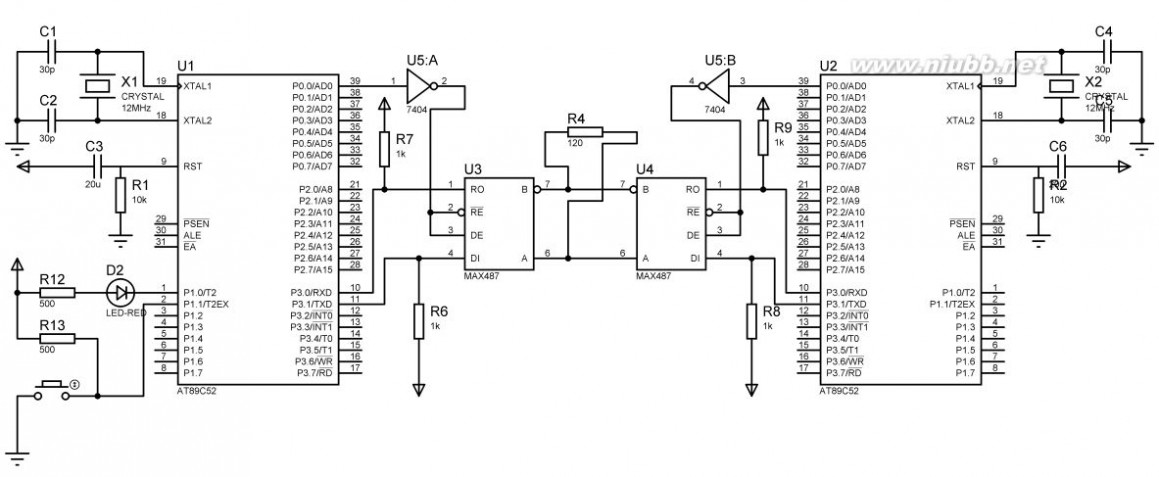
图9 主从机通信硬件图
其中R6、R7、R8、R9为总线空闲时的箝位电阻,起抗随机干扰作用;R4为阻抗匹配电阻,起减小信号反射作用。(www.61k.com]
由于单片机输出的是TTL电平,所以当采用RS-485串行通信时,应先进行电平转换,本文采用一种高性能的RS-485接口芯片MAX487。
该芯片采用单一电源+5 V工作,额定电流为300μA,采用半双工通讯方式。它完成将TTL电平转换为RS-485电平的功能。其引脚结构图如图1所示。
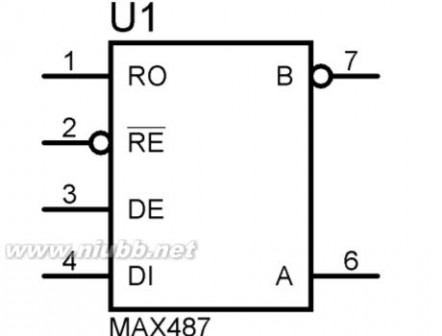
图10 MAX487管脚分配图
由图可以看出,MAX487芯片的结构和引脚都非常简单,内部含有一个驱动器和接收器。RO和DI端分别为接收器的输出和驱动器的输入端,与单片机连接时只需分别与单片机的RXD和TXD相连即可;A端和B端分别为接收和发送的差分信号端,当A引脚的电平高于B时,代表发送的数据为1;当A的电平低于B端时,代表发送的数据为0;/RE和DE端分别为接收和发送的使能端,当/RE为逻辑0时,器件处于接收状态;当DE为逻辑1时,器件处于发送状态,因为MAX487工作在半双工状态,所以只需用单片机的一个管脚控制这两个引脚即可;在实际电路中常将/RE和DE短接,但此时若将它们直接与单片机I/O口相连,系统上电时,单片机的I/O端口置
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第10页
位为1,这时所有从机都处于发送状态,将导致总线冲突。[www.61k.com]解决的方法是将单片机的I/O口经反相器后再与/RE和DE相连,这样系统上电时所有从机均处于接收状态,不会出现总线仲裁。
4.路灯控制系统软件模块设计
4.1 信号采集程序设计
由系统硬件连接图可知,在编写软件时,应使P2.7=0,P0.0、P0.1、P0.2给出被选择的模拟通道地址。执行一条写出指令,可启动A/D转换;执行一条读入指令,可读取转换结果,通过查询P3.3的状态可判断A/D转换是否结束。
程序流程图为: 子程序代码为:

图11 信号采集流程图
4.2 光强控制程序设计
在光强控制模块中,光线信号的采集是关键。从机单片机通过P1.3口驱动继电器动作,开启路灯
程序流程图为:

路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第11页
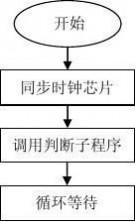

图12 光强控制流程图 源程序代码见附录。(www.61k.com]
4.3 分时控制程序设计
在分时控制中,首先需要对时钟芯片进行初始化。另外,由于PCF8563一次只能定义一个报警时间,所以每当触发一次中断时,除要对路灯进行控制外,还要对时钟芯片重新写入新的报警时间。从机单片机通过P1.0、P1.1、P1.2实现对路灯的控制。
程序流程图为:
图13 分时控制主程序流程图
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第12页
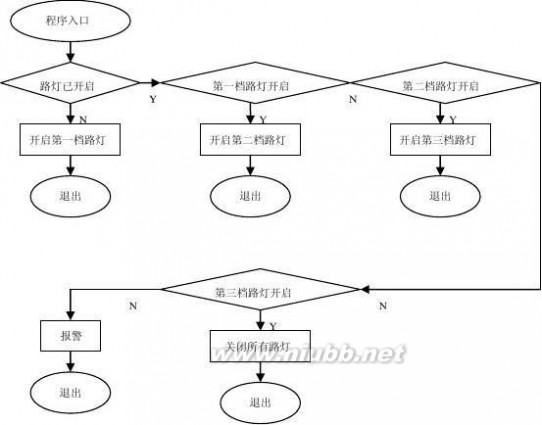
图14 分时控制子程序流程图
源程序代码见附录。[www.61k.com)
4.4 串行通信程序设计
单片机在通信过程中,若SM2为1,则只有当接收到的数据第九位RB8为1时数据才装入接收缓冲器SBUF并置RI=1。如果收到的数据第九位为0,则不置位中断标志RI,数据将丢失。若SM2为0则接收到一个字节后,不管接收到的数据第九位是1还是0都置位中断标志位RI,并将数据装入SBUF。应用此特点,可实现单片机之间的串行通信。利用第9位TB8作为地址/数据识别位,TB8=1表示发送的是地址帧;TB8=0表示发送的是数据帧。
在主从式多机通信中,为保证通信正常进行,首先应做到主机与从机串行口的设置一致,即数据格式一致、通信波特率相同。
多机通信的过程如下:
(1)系统上电或复位后,首先使所有从机的SM2位置1,处于只接收地址帧的状态。
(2)主机先发送一帧地址信息,其中8位地址位,第9位为地址/数据信息的标志位,该位置1表示该帧为地址信息。
(3)从机接收到地址帧后,各自将接收的地址与本机的地址比较。对于地
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第13页
址相符的那个从机,使SM2位清零,同时发送应答帧,等待接收主机随后发来的所有信息;对于地址不符的从机,仍保持SM2=1,对主机随后发来的数据不予理睬,直至发送新的地址帧。(www.61k.com]
(4)主机收到从机的应答地址后,确认地址是否相符。如果地址不符,报警;如果地址相符,则清TB8,开始发送数据。
本文中设从机地址为01H,主机令从机发送数据的命令字节为0FEH,主机要求结束与从机通信的命令字节0EEH。
程序流程图为:

图15 串行通信主机程序流程图
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第14页
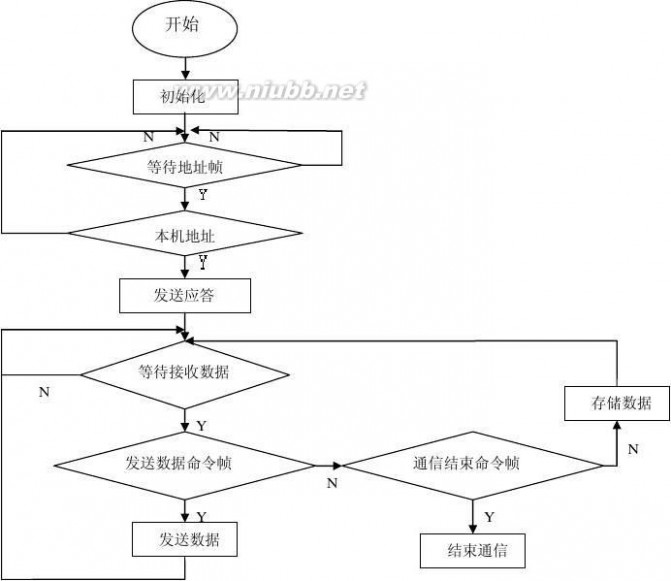
图16 串行通信从机程序流程图 源程序代码见附录。(www.61k.com)
5.模拟仿真
5.1 光强控制仿真
实际应用中,光强设定值、光强持续时间应根据具体情况而定,仿真时假设设定值为80H,光强持续时间为10秒。
由仿真结果可知,当测量值持续10秒低于设定值时,继电器通电;当测量值持续10秒高于设定值时,继电器断电。
仿真结果与目标设想一致。
5.2 分时控制仿真
仿真之前,首先应对时钟芯片进行初始化,现将时钟芯片的时间设为18:09:50,而定时报警时间为18:10。
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第15页
当时钟芯片的时间到达18:10:00时,芯片发出中断申请,单片机响应中断,对继电器进行操作。[www.61k.com]通过查询表1可知,此时应开启路灯并以93%额定电压运行,所以单片机驱动继电器1动作。仿真结果与目标设想一致。
对其他时间点的仿真也能到达预期效果。
5.3 串行通信仿真
本文在对串行通信进行仿真时,主要模拟从机选择和数据接收两类问题。在实际仿真中发现,由于软件设计时所制定的通信协议太过简单,为了到达一定准确度,只能将通信波特率设的很低,使得通信速度较慢。
仿真中首先选中从机,然后进行数据传送。主机通过P1.0口表示从机选择信号发出,从机通过P2.0口表示从机选中;主机将要发送的数据通过P2口显示出来,从机将接收到的数据通过P1口显示出来。
仿真结果与预期相符。
结论
路灯设备是使用量非常大的基础用电设备,它对提高道路的引导性,提高夜间行车的安全感和舒适感,防止犯罪活动,美化环境,具有很重要的意义。
路灯系统是道路交通不可缺少的照明设施。而智能路灯控制系统是专为大中规模的路灯系统设计的智能系统,它能有效增强路灯的控制效果,提高路灯的使用效率,延长路灯的使用寿命,是节能降耗的重要途径和有效方法,对我们的生产、生活有着重要的意义。
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第16页
参考文献
[1] 李楠 李少洁.模拟路灯控制系统.竞赛园地.2009年全国大学生电子设计竞赛一等奖[2] 于书敏,贾存良.路灯节能智能控制器的设计.照明工程学报.2009,12,4-20
[3] 康丽杰,张燕菲.路灯管理监测系统研究.石家庄学院学报2009,5,23-56
[4] 王立红.基于单片机的智能路灯控制系统.理论探讨+网络财富
[5] 肖丽仙.基于单片机的网络化路灯控制系统设计.电子测量技术.2006,25
[6] 任鹏飞,耿世勇,尹亚楠.基于单片机的LED路灯控制系统设计.河南工程学院学报(自然科学版),2009,4-4
[7] 于广辉.基于单片机的智能路灯监控系统设计.现代农业科学.2008.5.15(5)
[8] 赵永志.城市路灯监控管理系统的关键技术研究.工程技术.2007,27
[9] 曹伟.城市路灯系统的分布式控制设计与实现.辽东学院学报(自然科学版). 2008. 12.15(4)
[10]王翥,孙嘉宁,范士伟,郝晓强.节能型城市路灯监控系统的设计.微计算机信息,2009.25.7-2
[11]景春国,顾德英,舒冬梅.城市路灯监控系统中日出日落时间算法的实现.现代计算机,2003,5,163
[12]叶佩.MCS-51单片机的多机通信方式研究.计算技术与信息发展
[13]陈铁军,谢春萍.PC机与RS485总线多机串行通信的软硬件设计.现代电子技术, 2007, 5(244)
[14]余国卫.PC机与单片机通信在数据采集系统中的应用.微处理机,2006,4(2)
[15]白霞.R S-485接口技术中的有关问题.基础自动化,2002,2,(9)
[16]吴桂林,郑建勇.RS485上下位机多机通信网络系统设计.微计算机信息,2008,12,12-3
[17]禹言春,张丽丽,王贺涛.单片机的多机通信.安徽农学通报, 2007,04,13(9): 157-158
[18]刘志群.基于RS485实现的PC机与单片机多机通信.闽江学院学报.2007,28
[19]彭宏伟,边志远,李翠霞.基于RS-485总线的PC机与单片机串行通信系统的设计与实现. 大地测量与地球动力学,2009,29
[20]陈斌.基于RS-485的单片机多机通信技术.嵌入式系统
[21]杨将新,李华军,刘东骏.单片机程序设计及应用从基础到实践[M].北京:电子工业出版社,2006.
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第17页
[22]杨居义.单片机课程设计指导[M].北京:清华大学出版社,2009.
[23]马淑华,王凤文.单片机原理与接口技术. 北京:北京邮电大学出版社,2007.
附录
;光强控制源代码 ORG 0000H AJMP MAIN ORG 000BH AJMP DELAY ORG 001BH AJMP DELAY2 ORG 0040H MAIN:
MOV TMOD,#11H MOV IE,#8AH MOV TH0,#00H MOV TL0,#00H MOV R1,#0FFH MOV R2,#00H MOV TH1,#00H MOV TL1,#00H MOV R3,#0FFH MOV R4,#00H MOV P1,#00H START:
ACALL CAIJI MOV A,R0 CLR C
SUBB A,#MMH JC PART CLR TR1
MOV TH1,#00H MOV TL1,#00H MOV R3,#0FFH MOV R4,#00H SETB TR0
CJNE R2,#0A0H,PAT CLR TR0
MOV TH0,#00H MOV TL0,#00H MOV R1,#0FFH MOV R2,#00H MOV P1,#00H
PAT:
AJMP START PART: CLR TR0
MOV TH0,#00H MOV TL0,#00H MOV R1,#0FFH MOV R2,#00H MOV A,P1
CJNE A,#00H,PART2 SETB TR1
CJNE R4,#0A0H,PART2 CLR TR1
MOV TH1,#00H MOV TL1,#00H MOV R3,#0FFH MOV R4,#00H SETB P1.3 PART2: AJMP START DELAY:
DJNZ R1,NEXT INC R2
MOV R1,#0FFH
NEXT:MOV TH0,#00H MOV TL0,#00H RETI DELAY2:
DJNZ R3,NEXT2 INC R4
MOV R3,#0FFH
NEXT2:MOV TH1,#00H MOV TL1,#00H RETI CAIJI:
MOV DPTR,#7FF8H MOV A,#00H MOVX @DPTR,A LOOP:JB P3.3,LOOP
MOVX A,@DPTR MOV 20H,A MOV R0,20H RET END
;时间控制源程序代码ORG 0000H AJMP MAIN ORG 0003H AJMP STRT ORG 0040H MAIN:
SCL_8563 BIT P3.4 SDA_8563 BIT P3.5 TDATE EQU 46H S EQU 47H MIN EQU 48H HOU EQU 49H SUBA EQU 4AH MOV TCON,#00H MOV IE,#81H MOV 30H,#18H MOV 31H,#10H MOV 32H,#22H MOV 33H,#00H MOV 34H,#01H MOV 35H,#30H MOV 36H,#07H MOV 37H,#00H MOV P1,#00H ACALL SEND8563 MOV HOU,30H MOV MIN,31H LCALL SEND LCALL CLEAR LOOP:AJMP LOOP STRT: MOV A,P1
ANL A,#00000111B
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第18页
CJNE A,#00H,ZCX1 MOV A,#01H MOV P1,A MOV HOU,32H MOV MIN,33H LCALL SEND LCALL CLEAR RETI ZCX1:
CJNE A,#00000001B,ZCX2 MOV A,#00000010B MOV P1,A MOV HOU,34H MOV MIN,35H LCALL SEND LCALL CLEAR RETI ZCX2:
CJNE A,#00000010B,ZCX3 MOV A,#00000100B MOV P1,A MOV HOU,36H MOV MIN,37H LCALL SEND LCALL CLEAR RETI ZCX3:
CJNE A,#00000100B,ZCX4 MOV A,#00000000B MOV P1,A MOV HOU,30H MOV MIN,31H LCALL SEND LCALL CLEAR ZCX4:RETI SEND:
ACALL SEND8563chu RET CLEAR:
ACALL SEND8563bao RET
SEND8563: MOV S,#00H MOV MIN,#00H MOV HOU,#00H MOV SUBA,#02H MOV TDATE,S ACALL WRITE_8563 MOV SUBA,#03H MOV TDATE,MIN ACALL WRITE_8563 MOV SUBA,#04H MOV TDATE,HOU ACALL WRITE_8563 RET
SEND8563chu: MOV SUBA,#09H MOV TDATE,MIN ACALL WRITE_8563 MOV SUBA,#0AH MOV TDATE,HOU ACALL WRITE_8563 RET
SEND8563bao: MOV SUBA,#01H MOV TDATE,#02H ACALL WRITE_8563 RET
WRITE_8563: ACALL START MOV A,#0A2H
ACALL WRITE_BYTE MOV A,SUBA
ACALL WRITE_BYTE MOV A,TDATE
ACALL WRITE_BYTE ACALL STOP RET
WRITE_BYTE: MOV R0,#8 CLR C
CLR SCL_8563 DL: RLC A
MOV SDA_8563,C NOP NOP SETB SCL_8563 NOP NOP NOP
CLR SCL_8563 NOP NOP NOP
DJNZ R0,DL SETB SDA_8563 NOP NOP NOP
SETB SCL_8563 NOP NOP NOP CLR F0
JNB SDA_8563,ACKEND SETB F0 ACKEND: NOP NOP
CLR SCL_8563 RET START:
SETB SDA_8563 SETB SCL_8563 NOP NOP NOP
CLR SDA_8563 NOP NOP NOP
CLR SCL_8563 RET STOP:
CLR SCL_8563 NOP NOP NOP
CLR SDA_8563 NOP
路灯控制系统 路灯控制系统
东北大学秦皇岛分校课程设计(论文)第19页
NOP
SETB SCL_8563 NOP NOP NOP
SETB SDA_8563 NOP NOP NOP
CLR SCL_8563 RET END
;通信源程序代码 ;主机 ORG 0000H AJMP START ORG 0040H
START:MOV SCON,#90H MOV R3,#01H MOV R2,#0FEH MOV R4,#0EEH MOV R0,#20H MOV R1,#30H MOV P0,#0FFH MOV P1,#0FFH SETB C CLR P0.0 MOV TB8,C MOV A,R3 MOV SBUF,A
WAIT:JNB TI,WAIT CLR TI SETB P0.0
WAIT1:JNB RI,WAIT1 MOV A,SBUF CLR RI
MOV 40H,R3
CJNE A,40H,FAULT CLR P0.0 CLR C
MOV TB8,C MOV A,@R0 MOV SBUF,A
WAIT2:JNB TI,WAIT2 CLR TI SETB P0.0 ACALL DELAY CLR TB8 MOV A,R2 CLR P0.0 MOV SBUF,A
WAIT3:JNB TI,WAIT3 CLR TI SETB P0.0
WAIT4:JNB RI,WAIT4 MOV A,SBUF MOV @R1,A CLR RI ACALL DELAY CLR TB8 MOV A,R4 CLR P0.0 MOV SBUF,A
WAIT5:JNB TI,WAIT5 CLR TI SETB P0.0
LOOP:AJMP LOOP FAULT:CLR P1.0 LOOP1:AJMP LOOP1 DELAY:
MOV R7,#02H
DEL:MOV R6,#0FFH DEL1:DJNZ R6,DEL1 DJNZ R7,DEL RET END ;从机 ORG 0000H AJMP START ORG 0023H
AJMP BREAK ORG 0040H
START:MOV SCON,#0B0H MOV IE,#90H MOV R0,#20H MOV R1,#30H MOV P0,#0FFH HERE:AJMP HERE BREAK:
JNB RI,BREAK1 JNB SM2,BREAK2 CLR RI MOV A,SBUF
CJNE A,#01H,WAIT CLR SM2 CLR P0.0 MOV A,#01H CLR TB8 MOV SBUF,A WAIT:RETI BREAK2: CLR RI MOV A,SBUF
CJNE A,#0FEH,OUT1 CLR P0.0 MOV A,@R1 MOV SBUF,A
RETI OUT1:CJNE A,#0EEH,OUT2 SETB SM2 CLR RI RETI
OUT2:MOV @R0,A CLR RI RETI
BREAK1:SETB P0.0
CLR TI RETI END
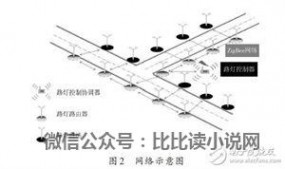
二 : Zigbee路灯控制系统
随着中国城市和经济的迅速发展,城市路灯照明已经成为展示城市魅力的名片和窗口,但是照明在带来绚丽和方便的同时,也遇到了诸多问题。据调查,我国小型城市在夜晚9点后,大中城市在午夜12点后,道路上行人非常稀少,即便是北京、上海、广州这样的繁华都市,凌晨2点以后,道路上也罕见行人、车辆。这时如果保持“恒照度”会造成资源的大量浪费;另外后半夜是用电的低谷期,电力系统的电压升高,路灯反而会更亮,而我国现行70%的道路照明使用的高压钠灯,此类电网电压的波动致使灯泡的实际使用寿命不超过1年,带来了高额的维修费和材料费,并且系统难以及时反馈路灯运行的故障信息,无法进行远程控制和处理,只能采取人工巡查方式。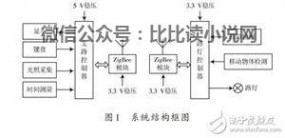




61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1