一 : 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考

画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
画法几何及机械制图 画法几何及机械制图学习参考
二 : 画法几何及机械制图学习参考
第 2章
直线、 点、直线、平面的投影
摘 要: 本章主要介绍投影法的基本知识,并将投影法直接 应用于基本几何体的投影及形成立体表面的基本要素—— 点、直线、平面的投影分析,从而为组合体的投影表达、 读图分析提供必要的理论基础及方法。
2.1 2.2 2.3 2.4 2.5
投影法 点的投影 直线的投影 平面的投影 换面法
1/86
Wang chenggang
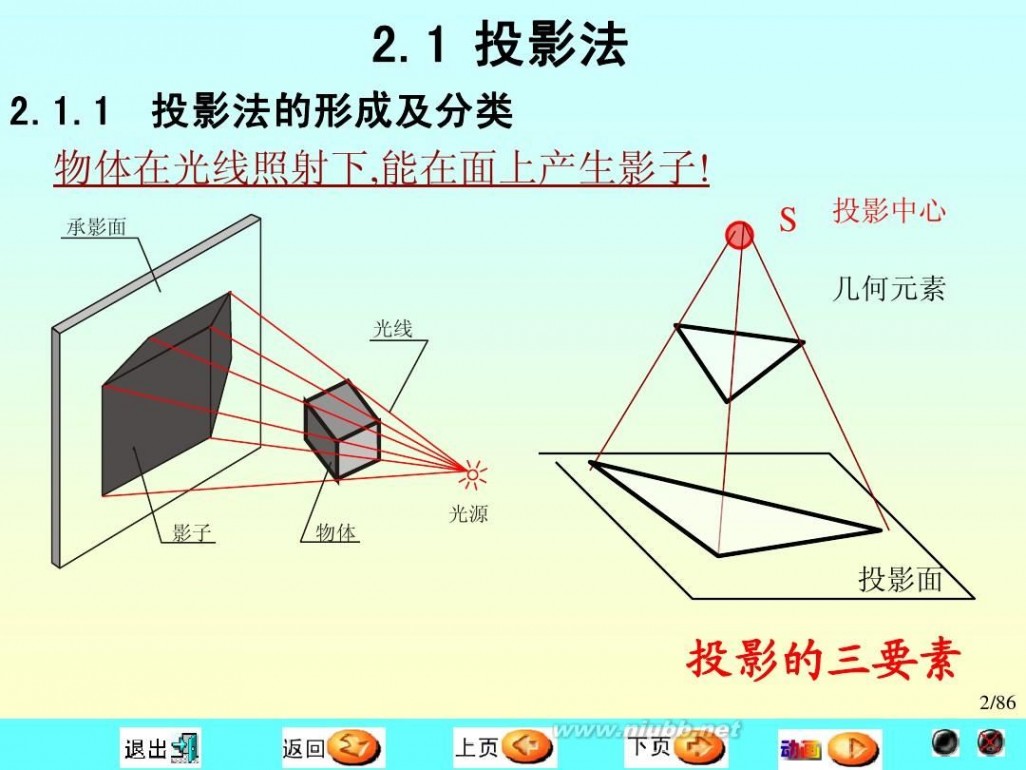
2.1 投影法
2.1.1 投影法的形成及分类 物体在光线照射下,能在面上产生影子!
承影面
S 投影中心
几何元素
光线
光源 影子 物体
投影面
投影的三要素
2/86
Wang chenggang
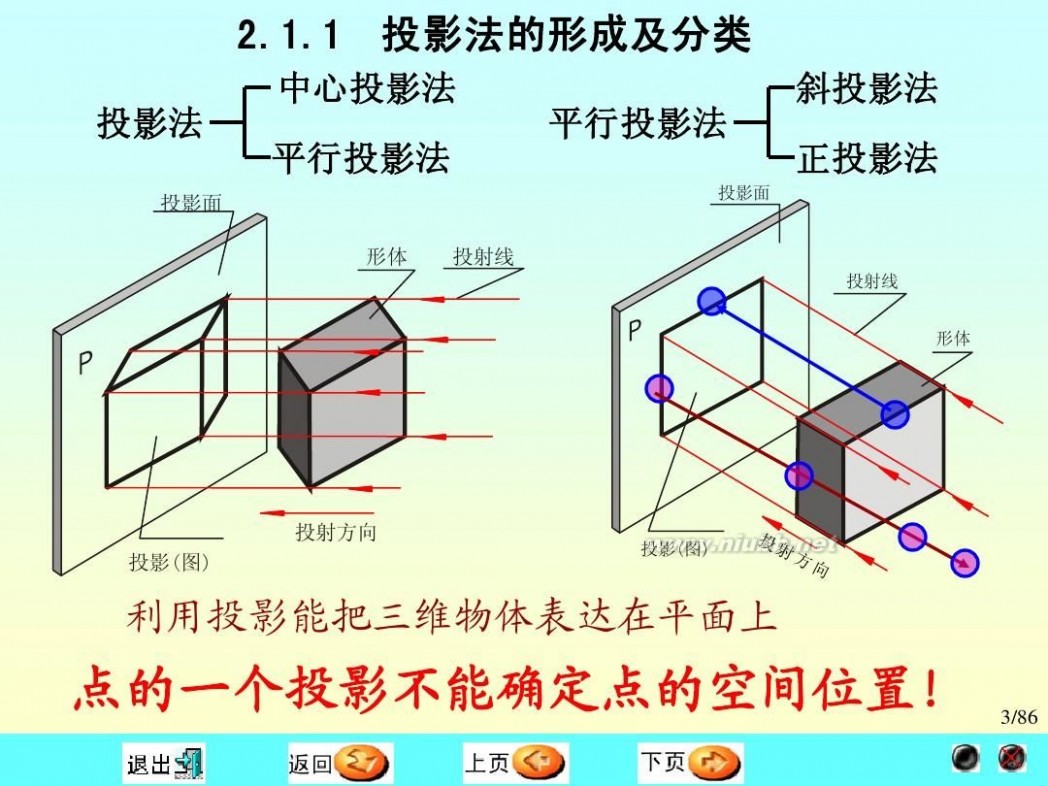
2.1.1 投影法的形成及分类
中心投影法 投影法 平行投影法
投影面
斜投影法 平行投影法 正投影法
投影面 形体 投射线
投射线
形体
投射方向
投影(图)
投影(图)
利用投影能把三维物体表达在平面上
点的一个投影不能确定点的空间位置! 点的一个投影不能确定点的空间位置!
3/86
Wang chenggang
2.2
点的投影
一、点在两投影面体系第一分角中的投影 1、两投影面体系的建立 用两个相互垂直的平面为影 平面,构成两投影面体系 2、点的两面投影
正立投影面 分角
a’
V A O
2
V 1 X O H
X
ax
3 a H
投影轴 水平投影面
Wang chenggang
4
4/86
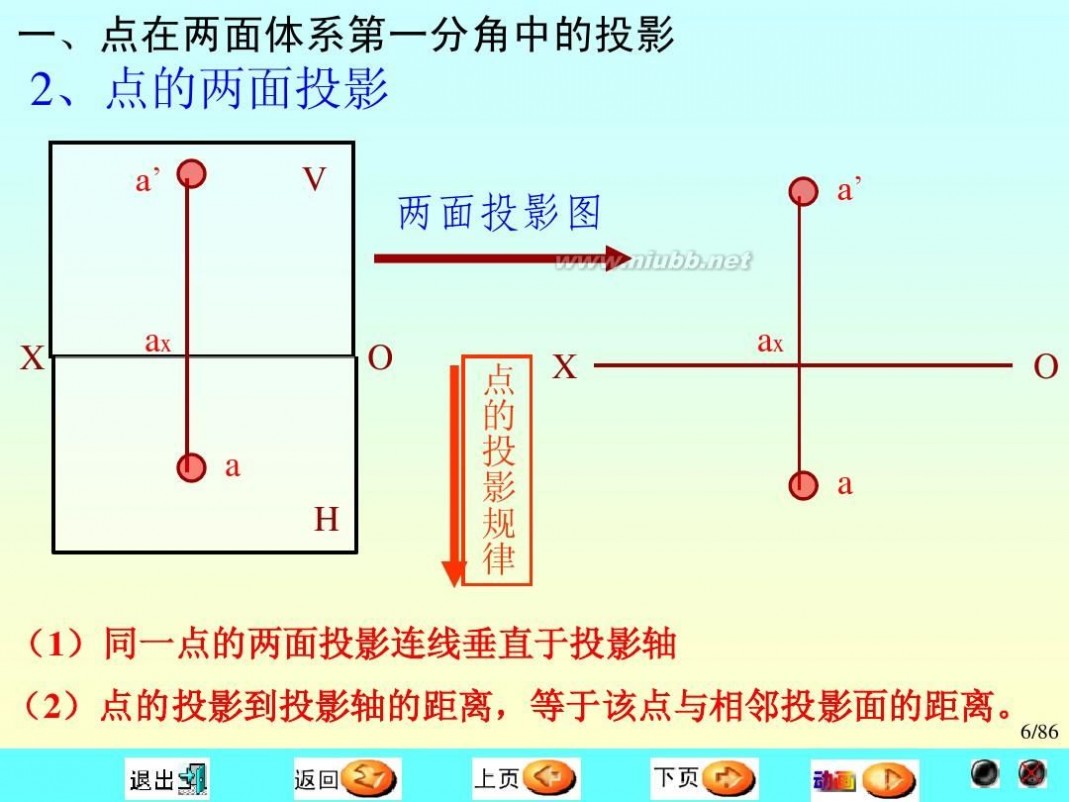
一、点在两投影面体系第一分角中的投影
2、点的两面投影
a’ V A a’ V
两面投影图
X ax O a X ax O a H
H
保持V面正李位置不变,使H面绕OX轴相下旋转90o!5/86
Wang chenggang
一、点在两面体系第一分角中的投影
2、点的两面投影
a’ V a’
两面投影图
ax ax
X
O 点 的 投 a 影 规 H 律
X
O a
1 2
点的两面投影 点的投影 投影 的
Wang chenggang
投影 点 投影面的 ?
6/86
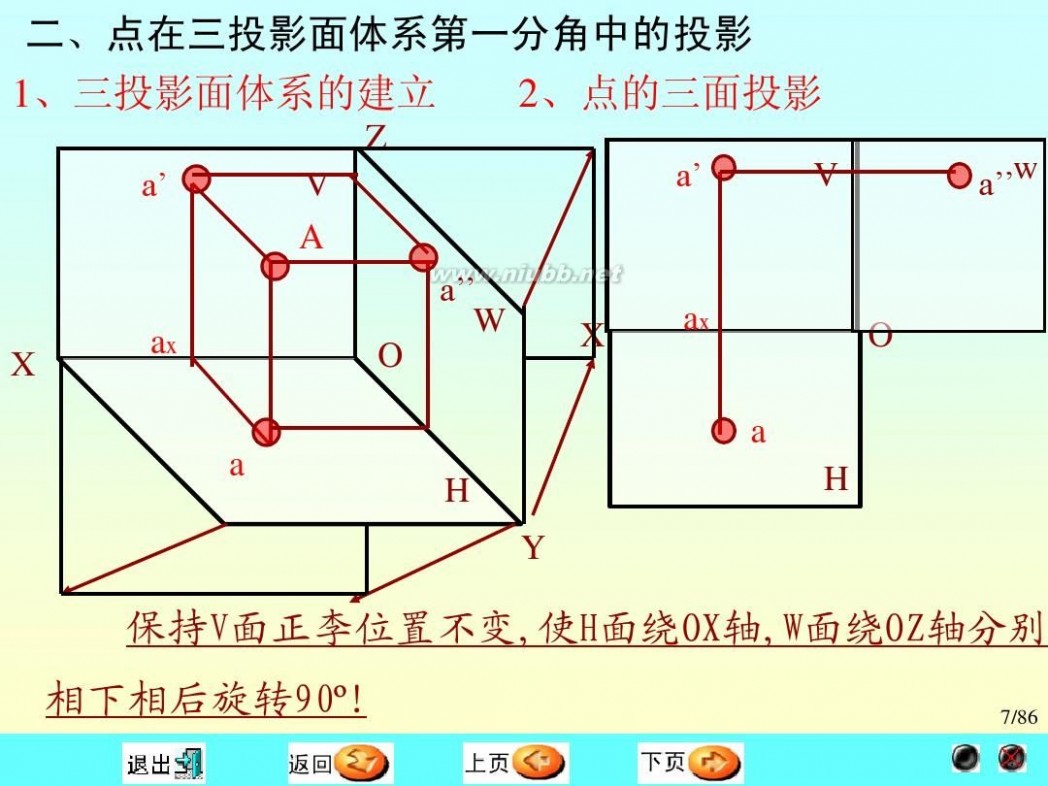
二、点在三投影面体系第一分角中的投影 1、三投影面体系的建立 2、点的三面投影
Z a’ V A ax a’’ W O a X ax a H Y H O a’ V a’’w
X
保持V面正李位置不变,使H面绕OX轴,W面绕OZ轴分别 相下相后旋转90o!
Wang chenggang
7/86
二、点在三投影面体系第一分角中的投影 2、点的三面投影
a’ V
相等!
三面投影图
a’’ w a’ Z az a’’
X
ax
O a H
X
ax
O
Yw
a
Yh (1)同一点的两面投影连线垂直于投影轴 (2)点的投影到投影轴的距离,等于该点与相邻投影面的距离。
水平投影到OX轴的距离等于其侧面投影到OZ轴的距离!8/86 水平投影到OX轴的距离等于其侧面投影到OZ轴的距离! OX轴的距离等于其侧面投影到OZ轴的距离
Wang chenggang
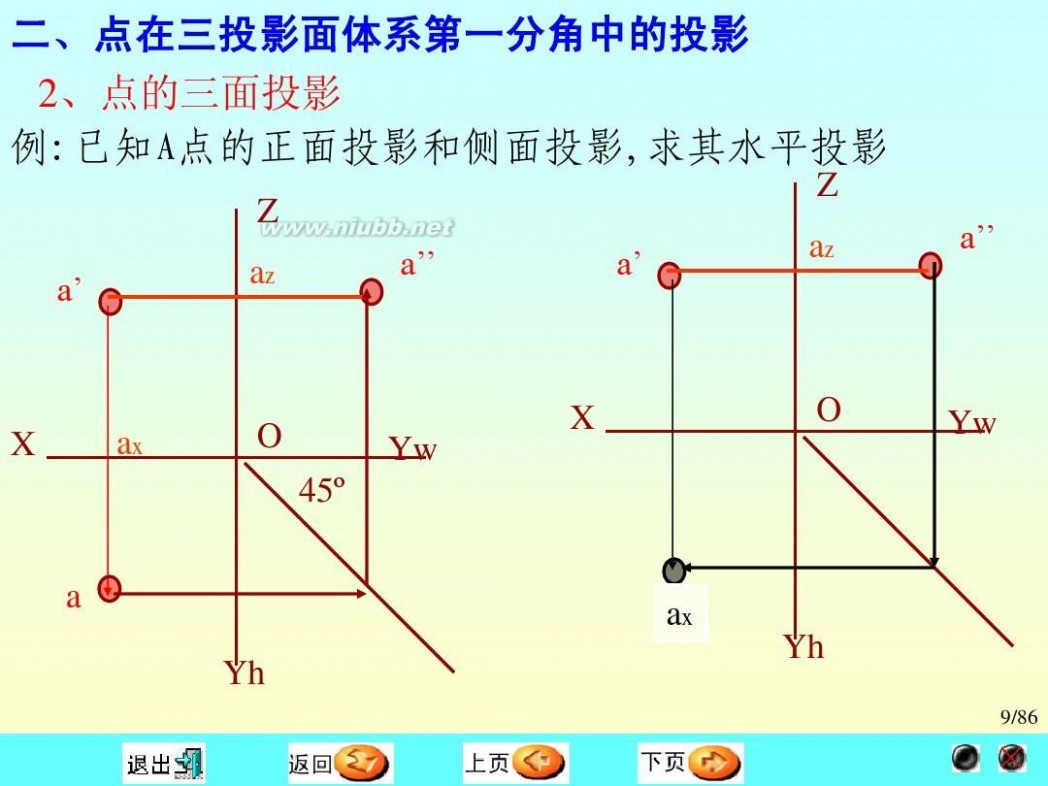
二、点在三投影面体系第一分角中的投影 2、点的三面投影 例:已知A点的正面投影和侧面投影,求其水平投影
Z a’ az a’’ a’ Z az a’’
X
ax
O 45o
Yw
X
O
Yw
a Yh
Wang chenggang
ax Yh
9/86
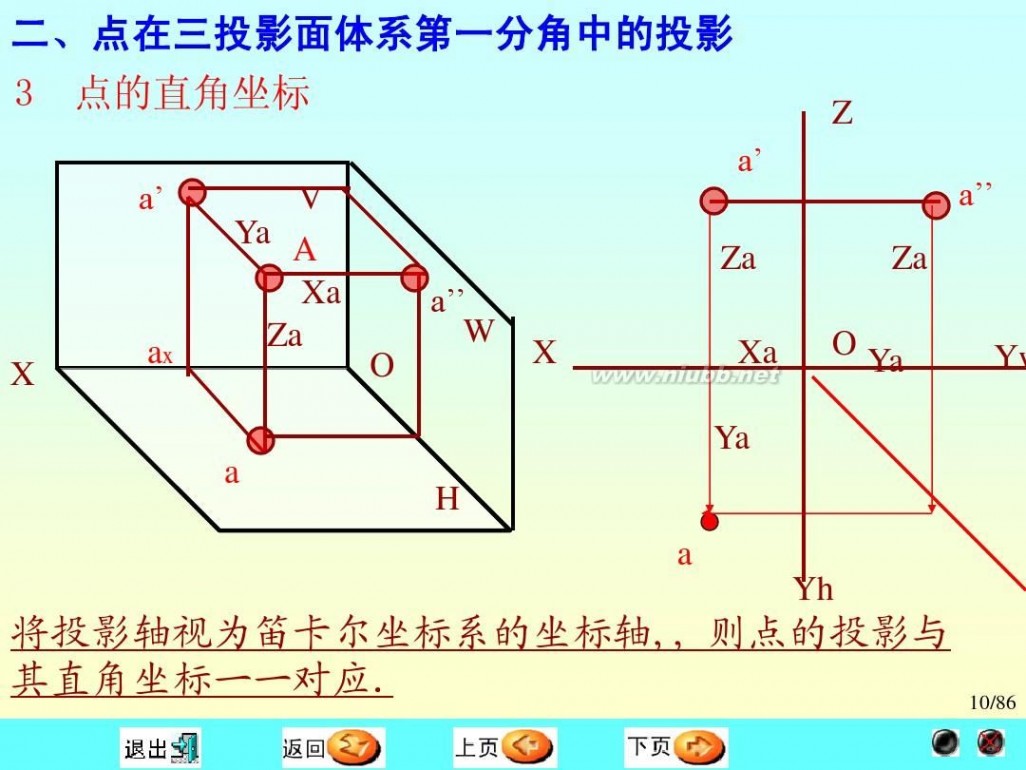
二、点在三投影面体系第一分角中的投影 3 点的直角坐标
a’ a’ V Ya A Xa Za
Z a’’
Za
a’’ W O X Xa Ya
Za O Ya Yw
X
ax
a
H a Yh
将投影轴视为笛卡尔坐标系的坐标轴,, 则点的投影与 其直角坐标一一对应.
10/86
Wang chenggang
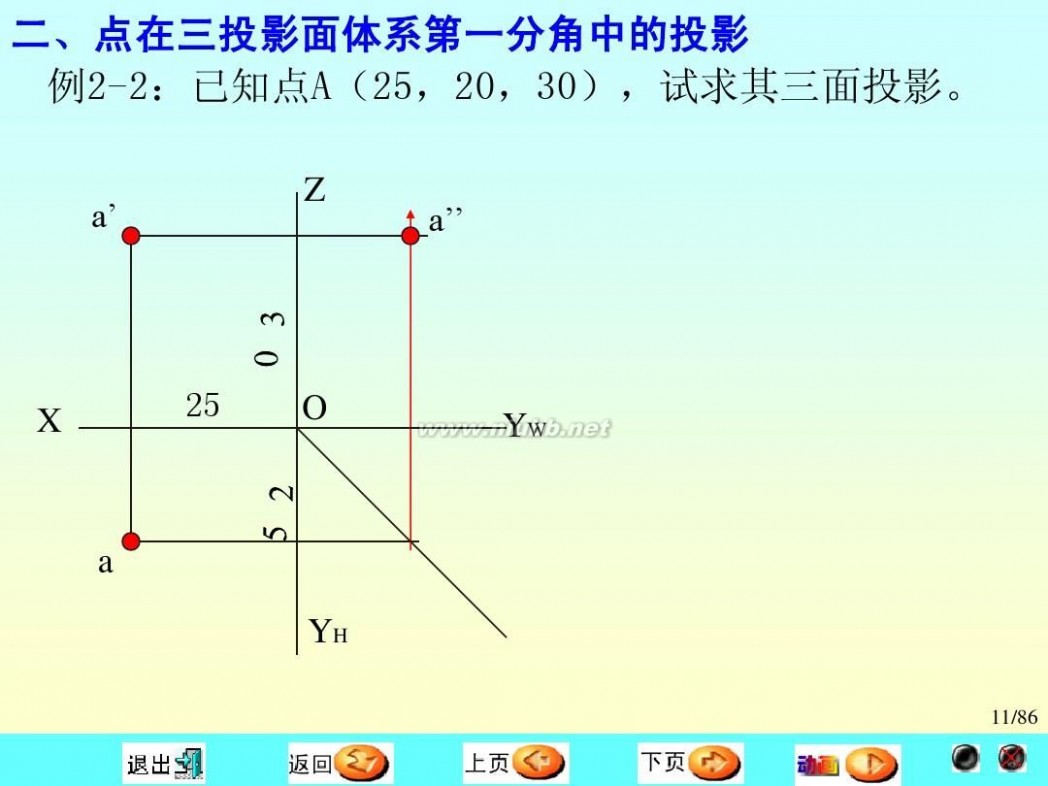
二、点在三投影面体系第一分角中的投影 例2-2:已知点A(25,20,30),试求其三面投影。
Z
a’
a’’
X
25
O
YW
a YH
11/86
Wang chenggang
特殊位置点的投影
投影面上的点,到该投影面的距离为0,故它的
1:投影面上的点 投影面上的点: 投影面上的点
一个投影与本身重合,另两面投影在投影轴上,.
B点在V面上
2:投影轴上的点 投影轴上的点: 投影轴上的点
Z B” 投影面轴的点,到两个投影面的距离 为0,故它有两面投影重合在投影轴上, 另一投影与坐标圆点重合.,.
B’
X a’
b c’ O
a’’ c’’ W Y
a c A点在H面上 YH
Wang chenggang
C点在OY轴上
12/86
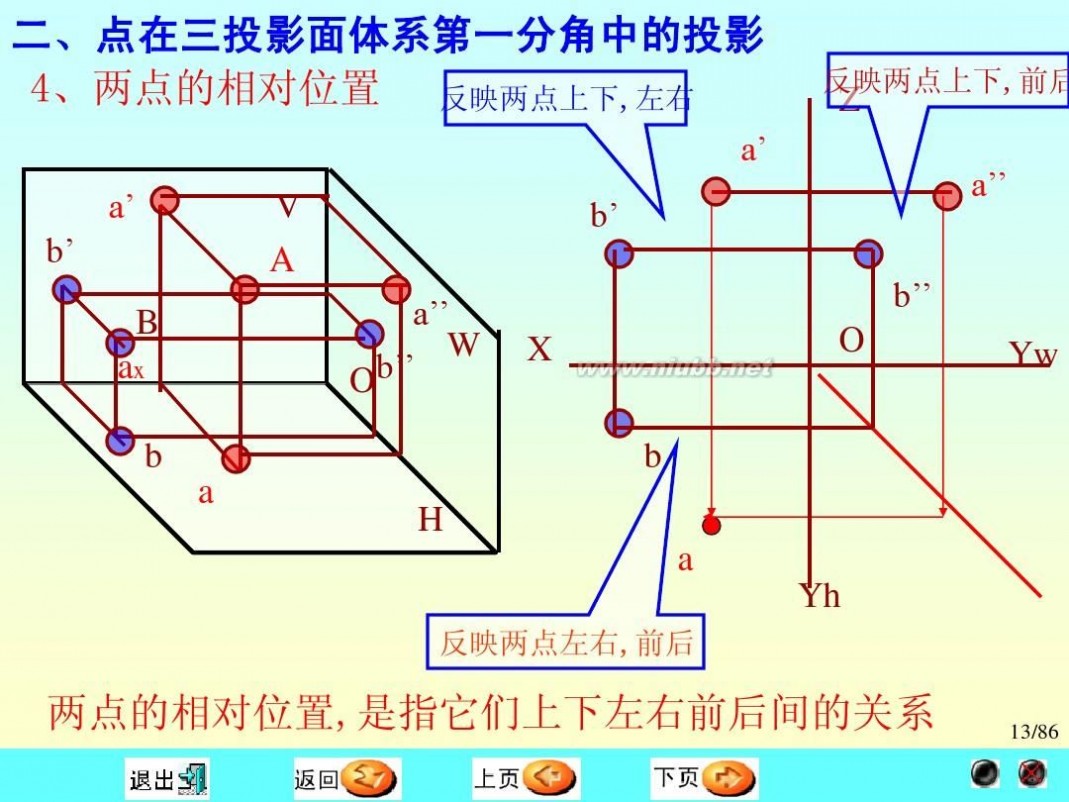
二、点在三投影面体系第一分角中的投影 4、两点的相对位置 反映两点上下,左右
a’ a’ b’ B X ax b a H a V A a’’ W O b’’ X b b’
反映两点上下,前后
Z
a’’ b’’ O Yw
Yh
反映两点左右,前后
两点的相对位置,是指它们上下左右前后间的关系
Wang chenggang
13/86
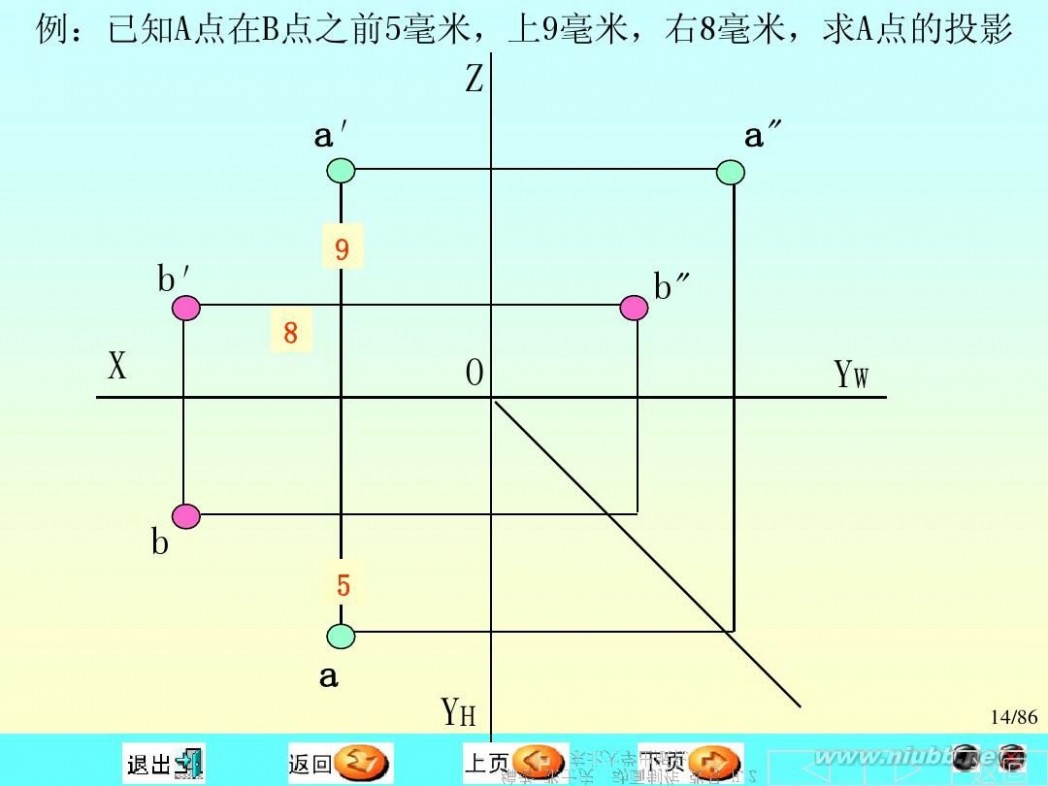
例:已知A点在B点之前5毫米,上9毫米,右8毫米,求A点的投影
Z a′ a"
9
b′
8
b" O YW
X
b
5
a YH
Wang chenggang
14/86
返回
二、点在三投影面体系第一分角中的投影 5、重影点
当空间两个点处于同一投射线上时,它门在与该投射线垂直 Z重影点 的投影面上的投影必重合,。此两点称为该投影面的重影点 重影点。 a’ a’’ a’ V b’ A b’’ b’ a’’ B W X O Yw ax O b’’ a b
X
H a (b) Yh
15/86
在投影图上常把不可见的投影点加上括号。
Wang chenggang
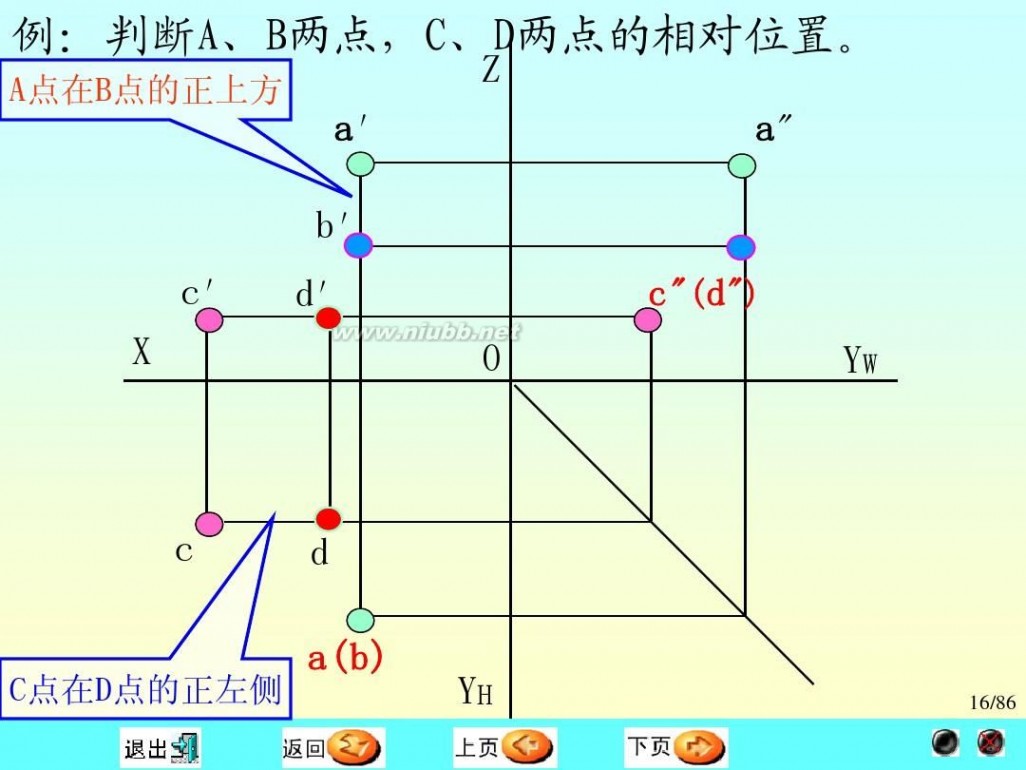
例:判断A、B两点,C、D两点的相对位置。
Z
A点在B点的正上方
a′ b′ c′ X d′ O
a"
c"(d") YW
c
d a(b)
C点在D点的正左侧
YH
Wang chenggang
16/86
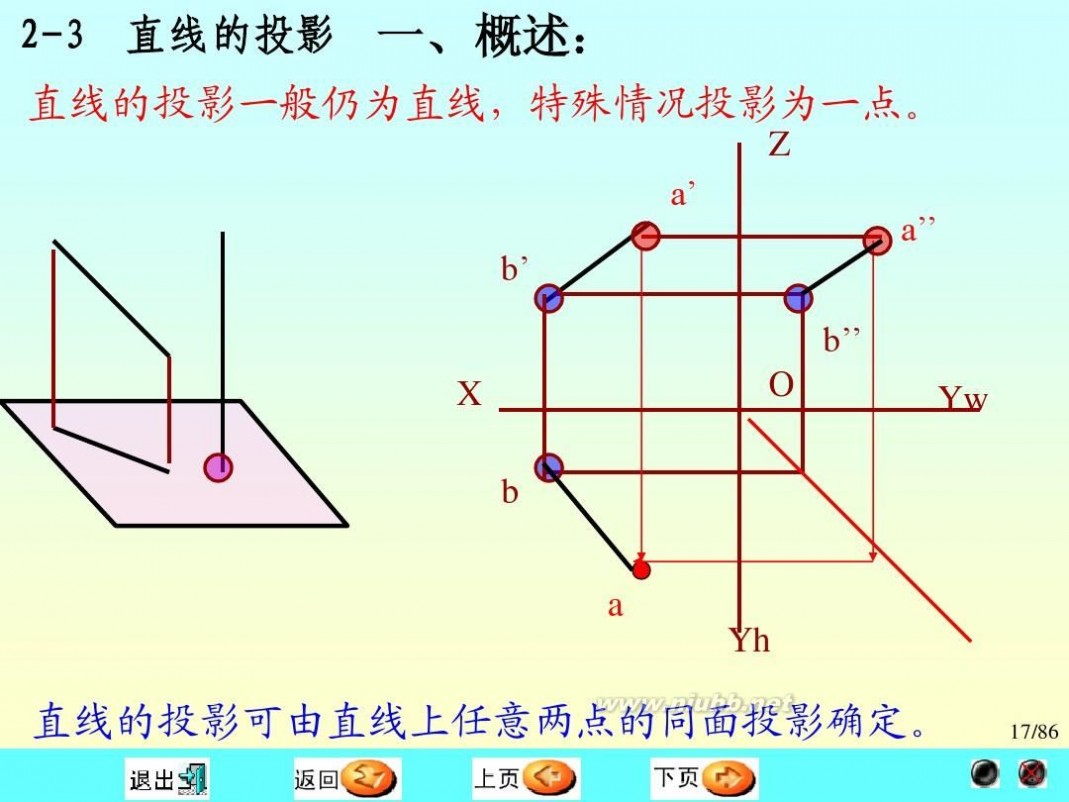
2-3
直线的投影 一、概述: 概述:
Z a’ a’’ b’ b’’ X b a Yh O Yw
直线的投影一般仍为直线,特殊情况投影为一点。
直线的投影可由直线上任意两点的同面投影确定。
Wang chenggang
17/86
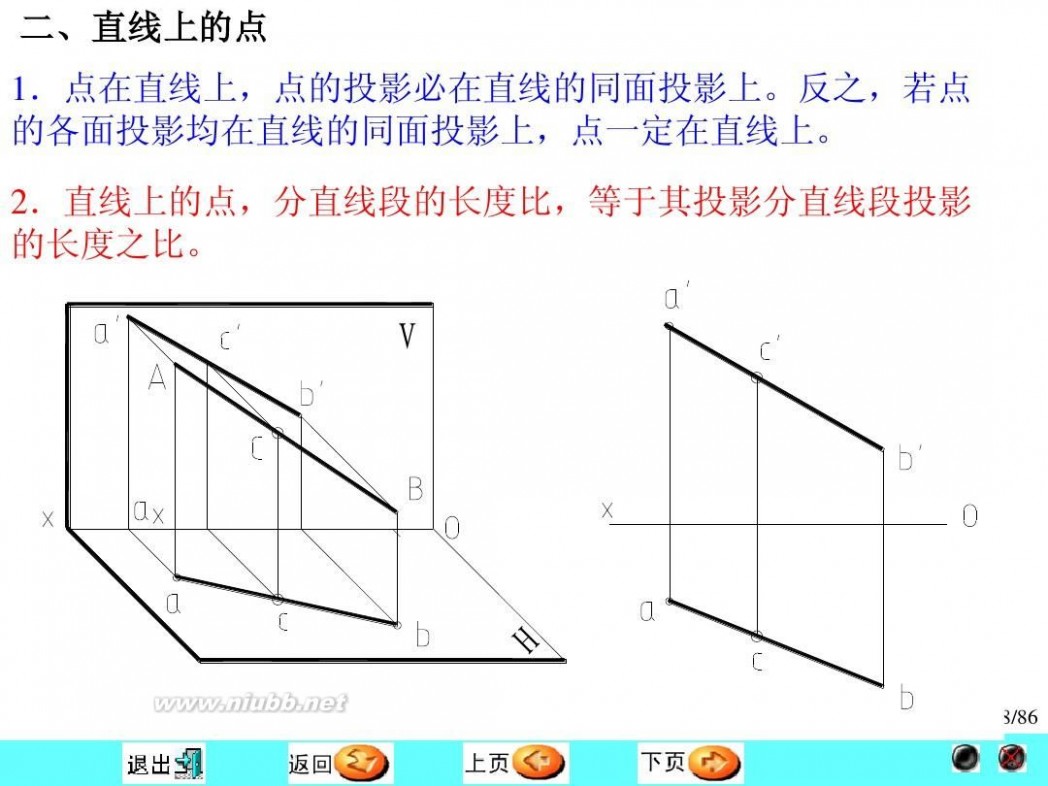
二、直线上的点 1.点在直线上,点的投影必在直线的同面投影上。反之,若点 的各面投影均在直线的同面投影上,点一定在直线上。 2.直线上的点,分直线段的长度比,等于其投影分直线段投影 的长度之比。
V
H
18/86
Wang chenggang
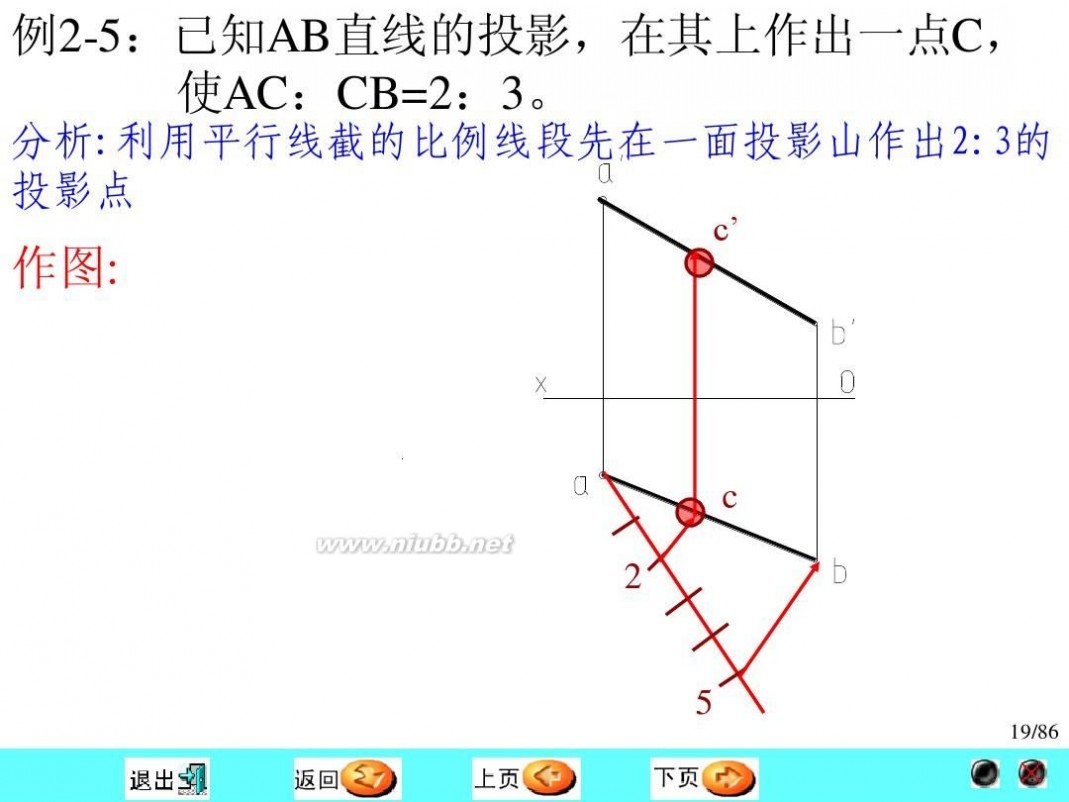
例2-5:已知AB直线的投影,在其上作出一点C, 使AC:CB=2:3。
分析:利用平行线截的比例线段先在一面投影山作出2:3的 投影点
c’
作图:
c 2
5
19/86
Wang chenggang
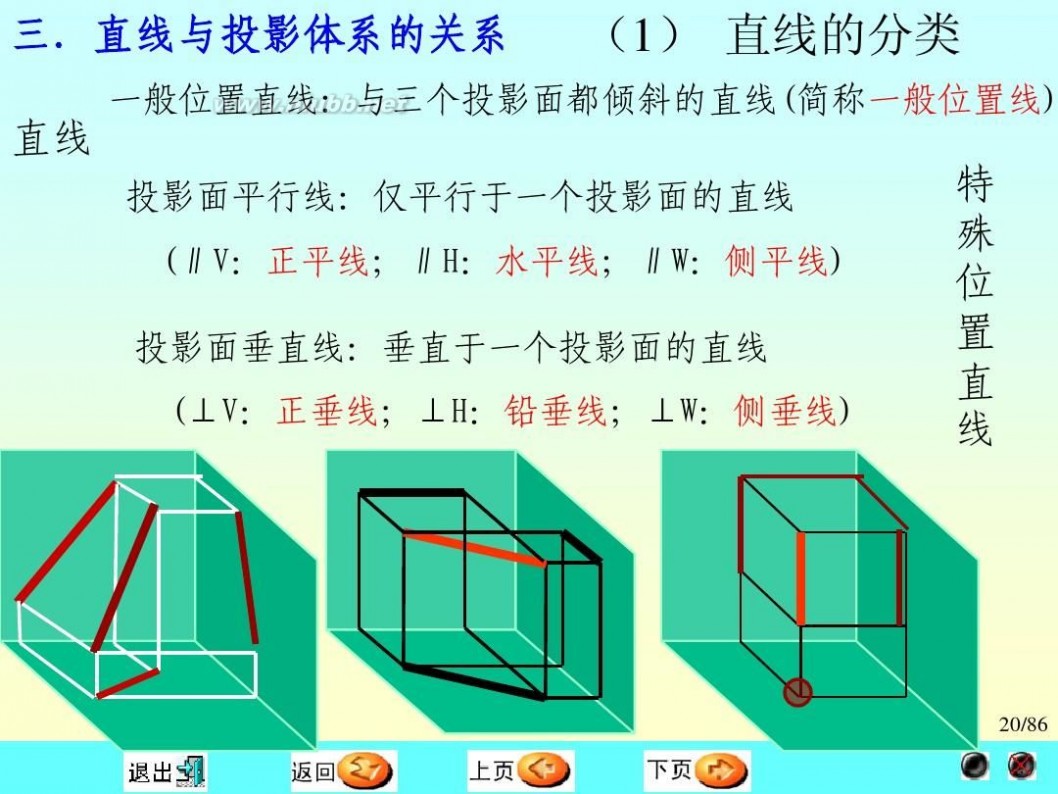
三. 直线与投影体系的关系 直线
(1) 直线的分类
一般位置直线:与三个投影面都倾斜的直线(简称一般位置线) 投影面平行线:仅平行于一个投影面的直线 (∥V:正平线;∥H:
水平线;∥W:侧平线) 投影面垂直线:垂直于一个投影面的直线 (⊥V:正垂线;⊥H:铅垂线;⊥W:侧垂线)
特 殊 位 置 直 线
20/86
Wang chenggang
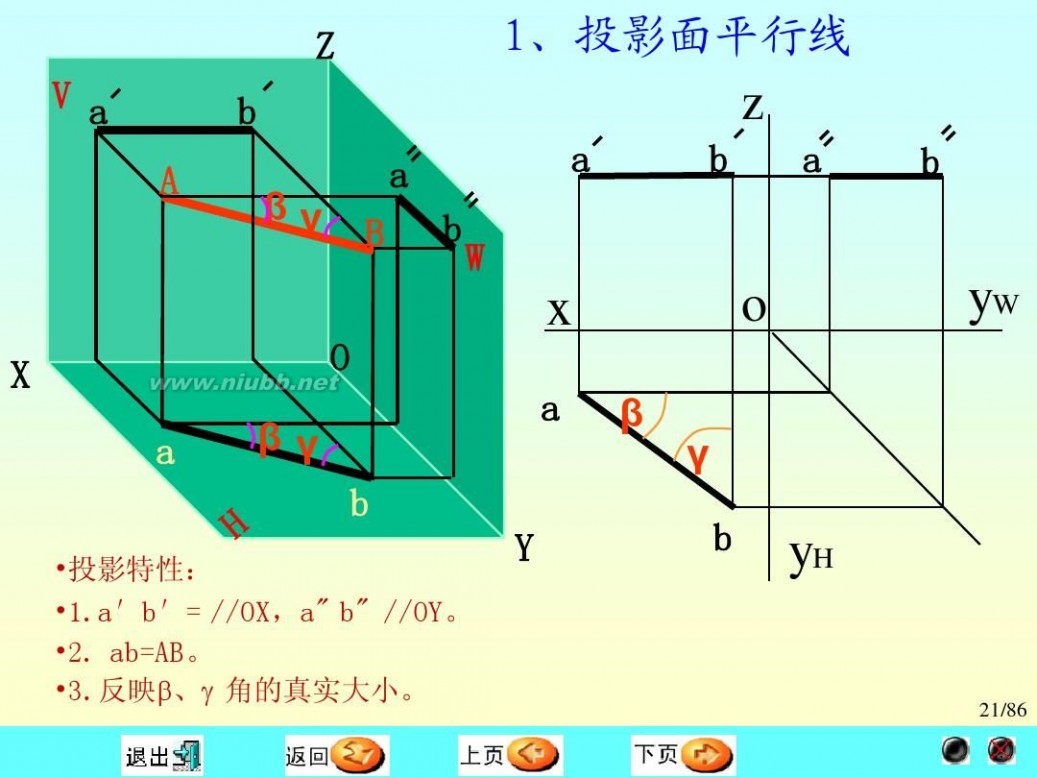
Z V a A βγ B b
1、投影面平行线
z
a a b W b a b
x
O X a a βγ b Y
?投影特性: ?1.a′b′= //OX,a" b" //OY。 ?2. ab=AB。 ?3.反映β、γ 角的真实大小。
Wang chenggang
o
β γ b
yW
yH
21/86
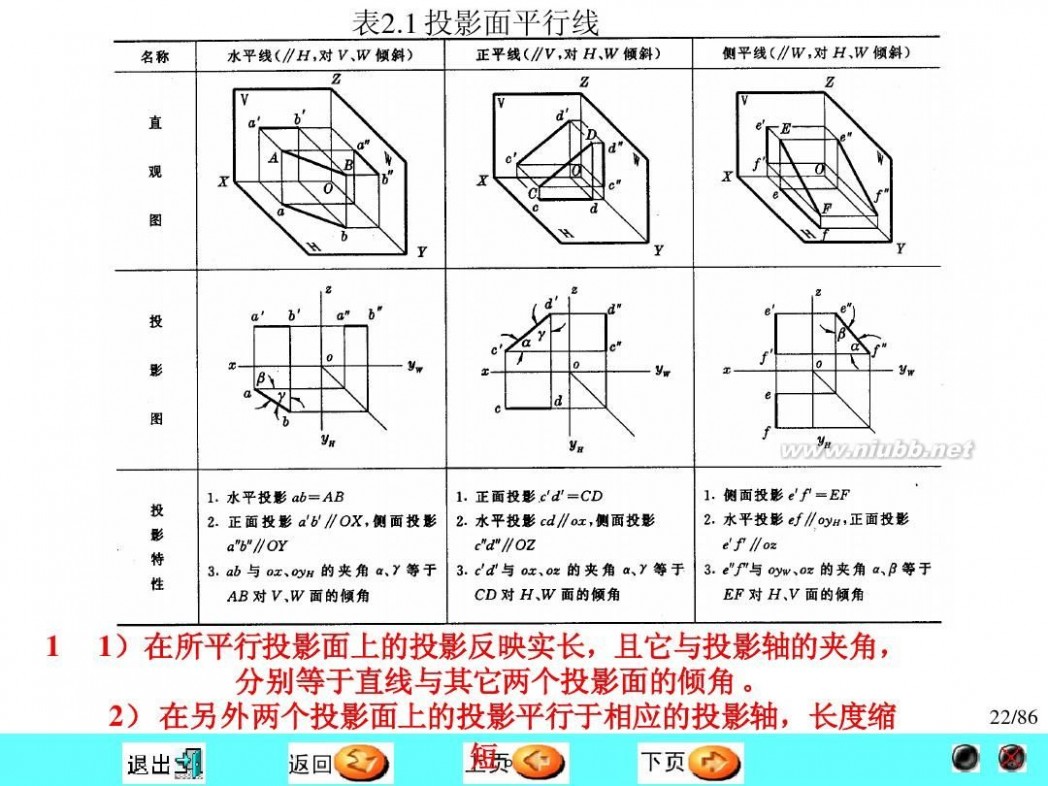
表2.1 投影面平行线
1
1)在所平行投影面上的投影反映实长,且它与投影轴的夹角, )在所平行投影面上的投影反映实长,且它与投影轴的夹角, 分别等于直线与其它两个投影面的倾角 。 2) 在另外两个投影面上的投影平行于相应的投影轴,长度缩 ) 在另外两个投影面上的投影平行于相应的投影轴, Wang chenggang 短。
22/86
2、投影面垂直线 、 Z V
z
a A a b X b B
O
a a
o
b YW
X
b a(b) YH
Y
投影特性: ?1.a b 积聚成一点。 ?2.a′b′⊥OX ; a″b″⊥ OY。 ?3.a′b′= a″b″=AB。
Wang chenggang
a(b)
23/86
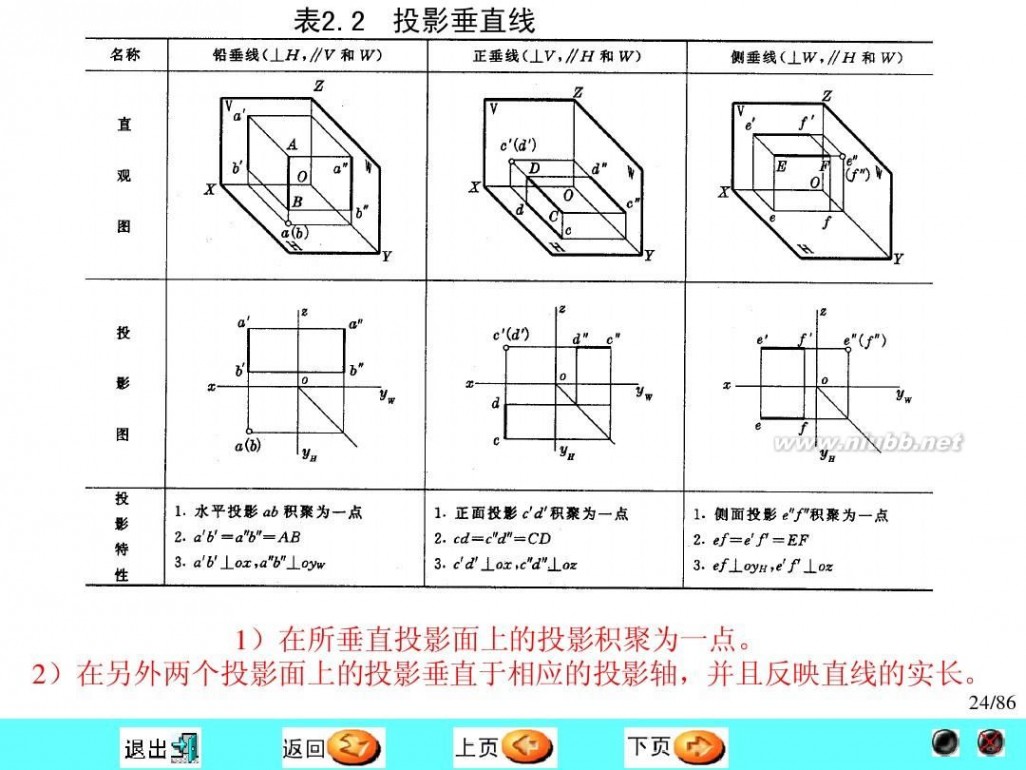
表2.2 投影垂直线
1)在所垂直投影面上的投影积聚为一点。 2)在另外两个投影面上的投影垂直于相应的投影轴,并且反映直线的实长。
24/86
Wang chenggang
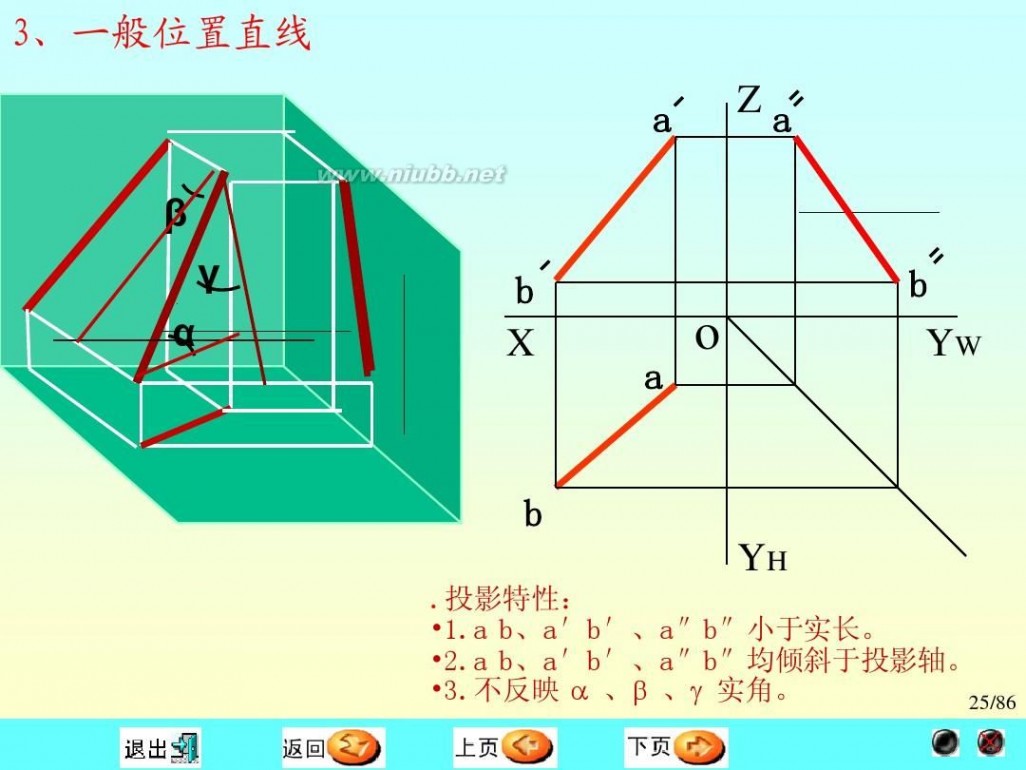
3、一般位置直线 a β γ α b X a Za
o
b YW
b YH
.投影特性: ?1.a b、a′b′、a″b″小于实长。 ?2.a b、a′b′、a″b″均倾斜于投影轴。 ?3.不反映 α 、β 、γ 实角。 25/86
Wang chenggang
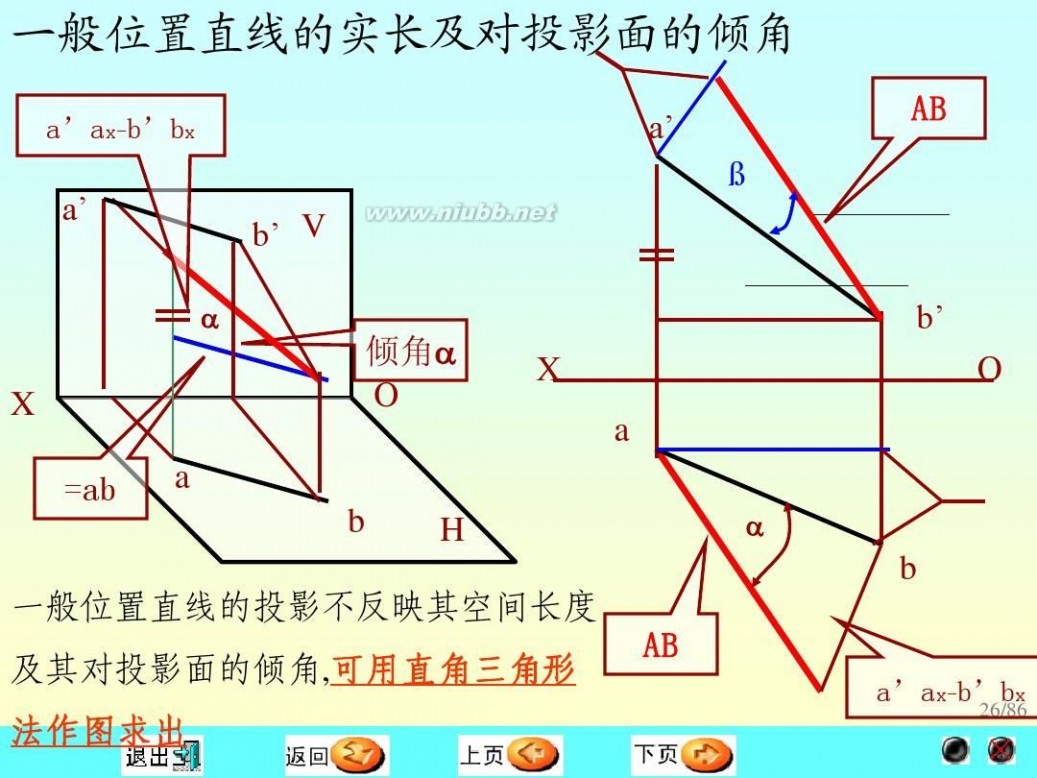
一般位置直线的实长及对投影面的倾角
a’ax-b’bx
a’ ? b’ V
α
AB
a’
X =ab a b
倾角α α O
b’ X a O
H
α
b 一般位置直线的投影不反映其空间长度 AB 及其对投影面的倾角,可用直角三角形 可用直角三角形
a’ax-b’bx
26/86
法作图求出
Wang chenggang
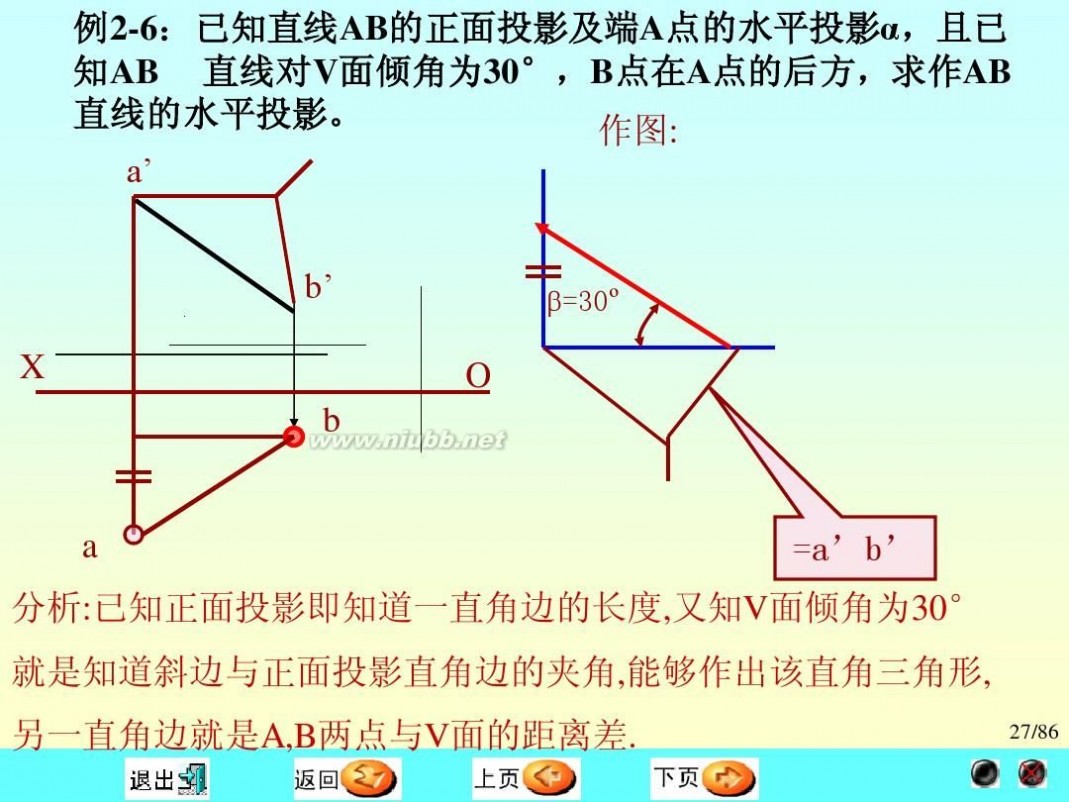
的正面投影及端A点的水平投影 例2-6:已知直线 的正面投影及端 点的水平投影 ,且已 :已知直线AB的正面投影及端 点的水平投影α, 直线对V面倾角为 面倾角为30° 点在A点的后方 知AB 直线对 面倾角为 °,B点在 点的后方,求作 点在 点的后方,求作AB 直线的水平投影。 直线的水平投影。 作图: a’ b’ X b O
β=30o
a
=a’b’
分析:已知正面投影即知道一直角边的长度,又知V面倾角为30° 就是知道斜边与正面投影直角边的夹角,能够作出该直角三角形, 另一直角边就是A,B两点与V面的距离差.
Wang chenggang
27/86
四、直线与直线的相对位置
空两直线的相对位置有三种:平行、相交和交叉(异面), 1;平行两直线 1;平行两直线
b' c' a' c a b d d'
b' d' a' c'
Z
c''
d'' b''
X
a c b d
O
a''
Y W
平行两直线的所有同 面投影都互相平行,且具 有定比性。
Y H
d'
2;相交两直线 2;相交两直线
b' k c' a' a c k b d c K d' c' a' b' k
Y Z
Z
d'' k b''
d'
X
a k b
O
a'' c''
Y W
相交两直线的所有同 面投影都相交,
其交点符 合点的投影规律,且具有 定比性。
d
Y H
28/86
Wang chenggang
Z
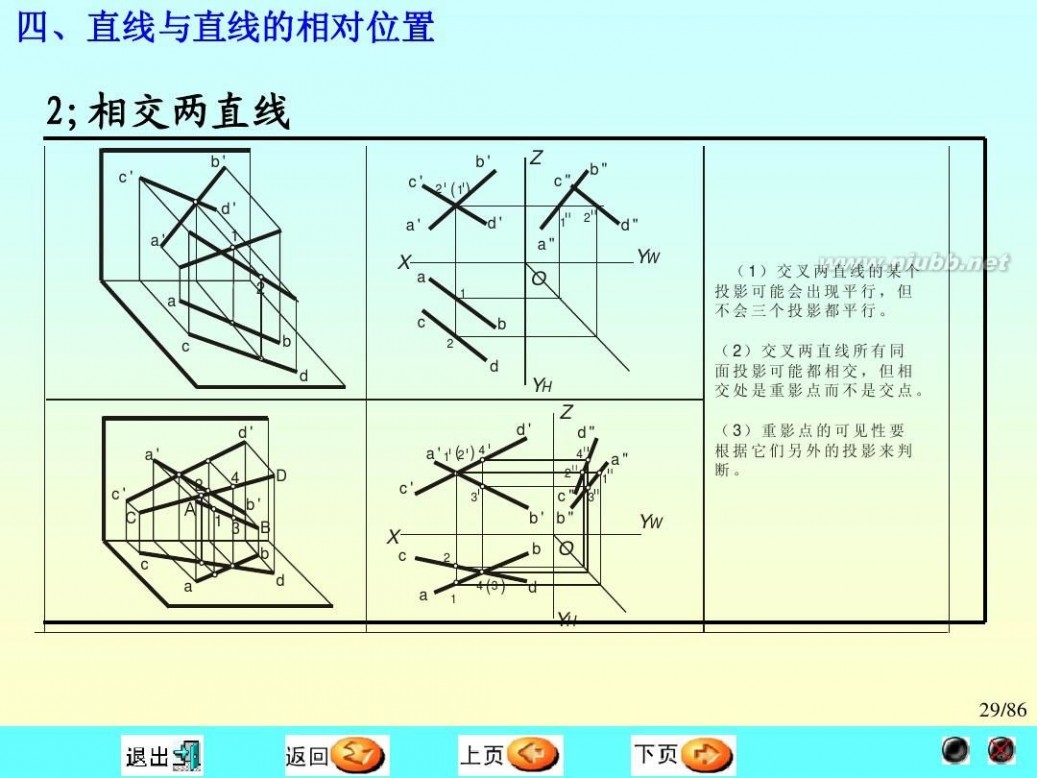
四、直线与直线的相对位置
2;相交两直线 2;相交两直线
c' a' a c b' c' d' 1 2 b d d' a' c' C c a 2 4 b' 13 B b d D c' a' 1 (2 ) 4
2 3 2 (1)
b' a' d'
Z
c''
1
b''
2
d''
X
a'' a
1
O
b
YW
c
2
(1)交叉两直线的某个 投影可能会出现平行,但 不会三个投影都平行。 (2)交叉两直线所有同 面投影可能都相交,但相 交处是重影点而不是交点。
d
YH
d'
Z
d''
4 1 3
a''
(3)重影点的可见性要 根据它们另外的投影来判 断。
X
c'' b' b'' b
YW
c a
2 1 4 (3 )
O YH
d
29/86
Wang chenggang
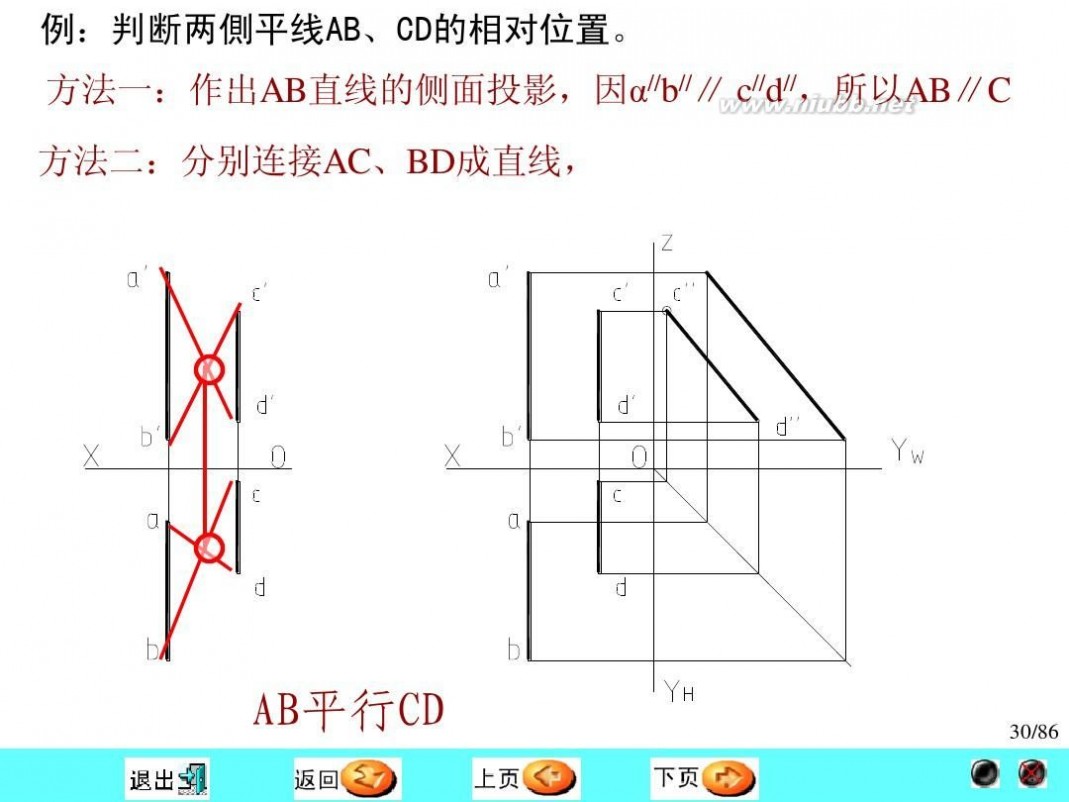
例:判断两側平线AB、CD的相对位置。 方法一:作出AB直线的侧面投影,因α//b//∥ c//d//,所以AB∥C 方法二:分别连接AC、BD成直线,
AB平行CD
Wang chenggang
30/86
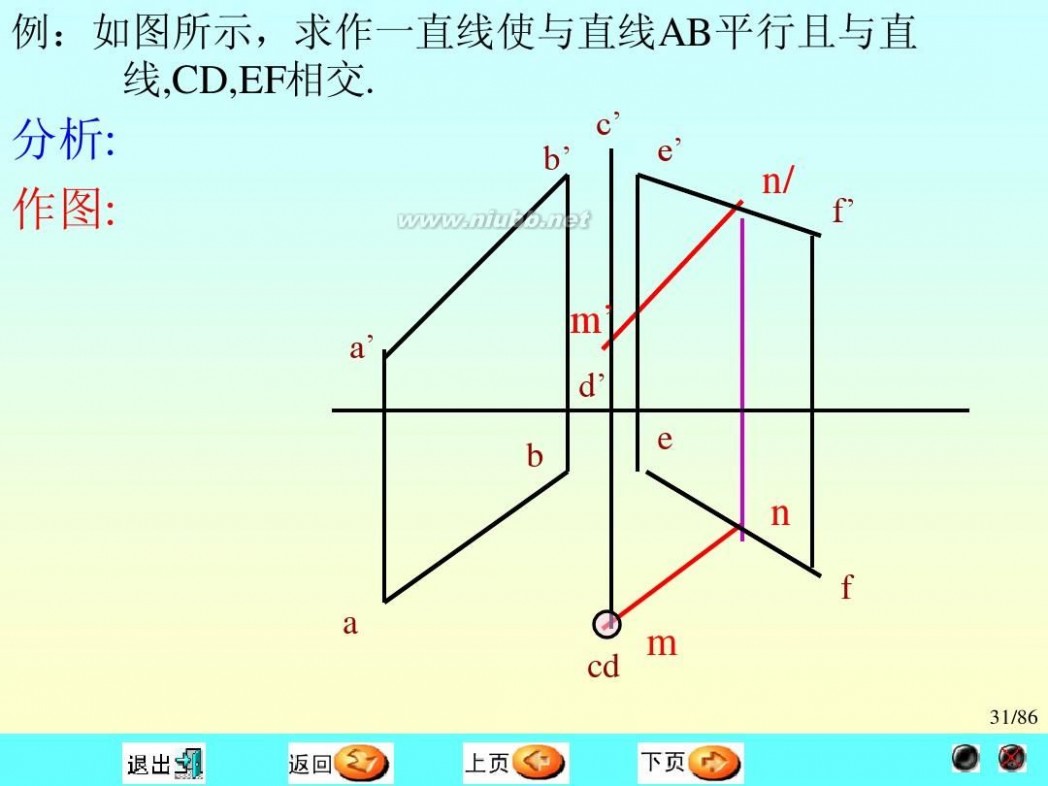
例:如图所示,求作一直线使与直线AB平行且与直 线,CD,EF相交.
c’
分析: 作图:
a’
b’
e’
n/
f’
m’
d’ b e
n
f a cd
Wang chenggang
m
31/86
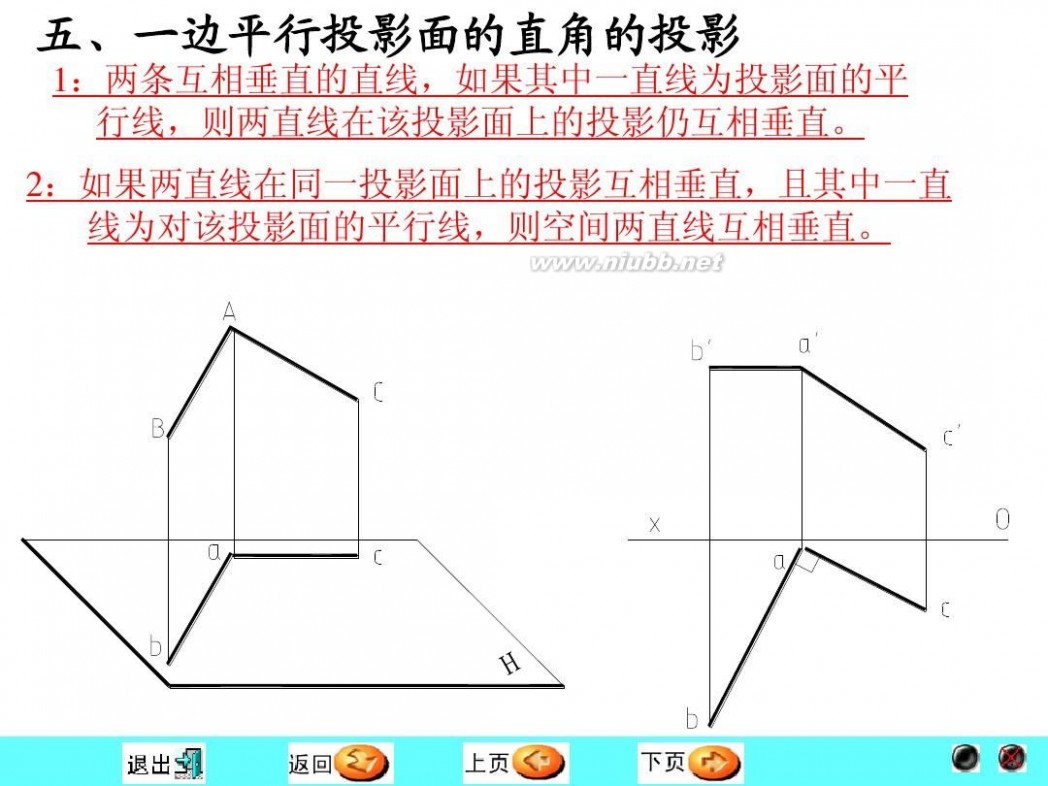
五、一边平行投影面的直角的投影
1:两条互相垂直的直线,如果其中一直线为投影面的平 行线,则两直线在该投影面上的投影仍互相垂直。 2:如果两直线在同一投影面上的投影互相垂直,且其中一直 线为对该投影面的平行线,则空间两直线互相垂直。
H
32/86
Wang chenggang
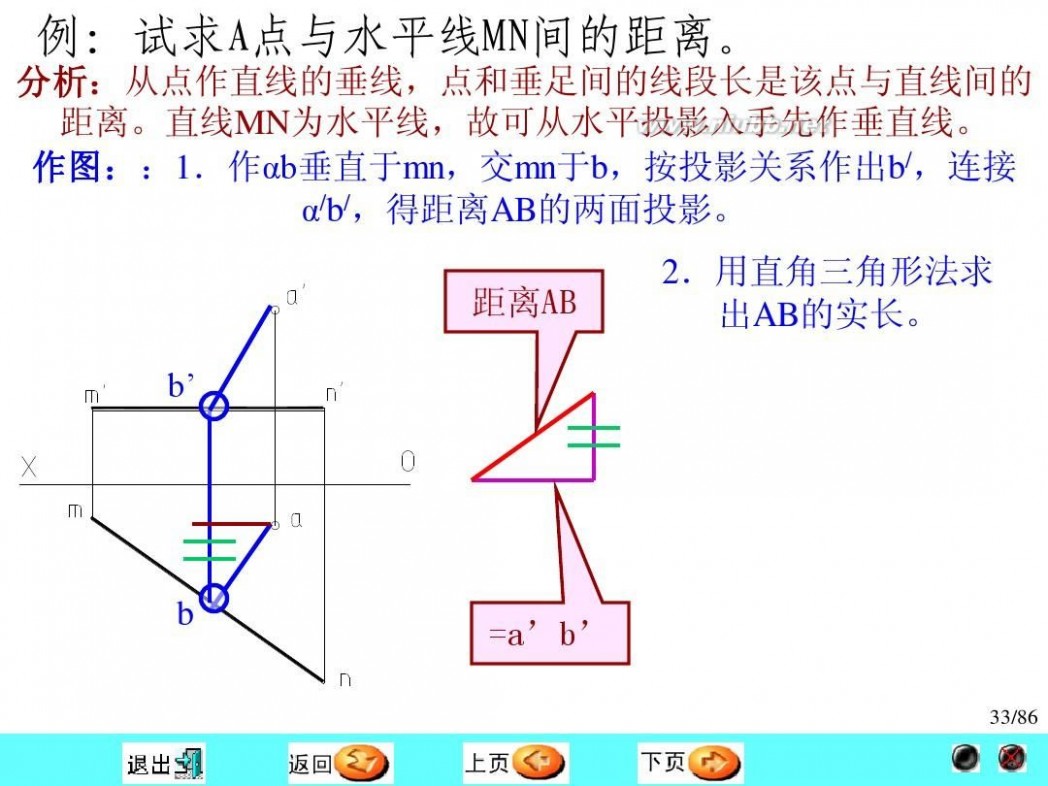
例:试求A点与水平线MN间的距离。
分析:从点作直线的垂线,点和垂足间的线段长是该点与直线间的 分析: 距离。直线MN为水平线,故可从水平投影入手先作垂直线。 作图: 作图::1.作αb垂直于mn,交mn于b,按投影关系作出b/,连接 α/b/,得距离AB的两面投影。 距离AB b’ 2.用直角三角形法求 出AB的实长。
b =a’b’
33/86
Wang chenggang
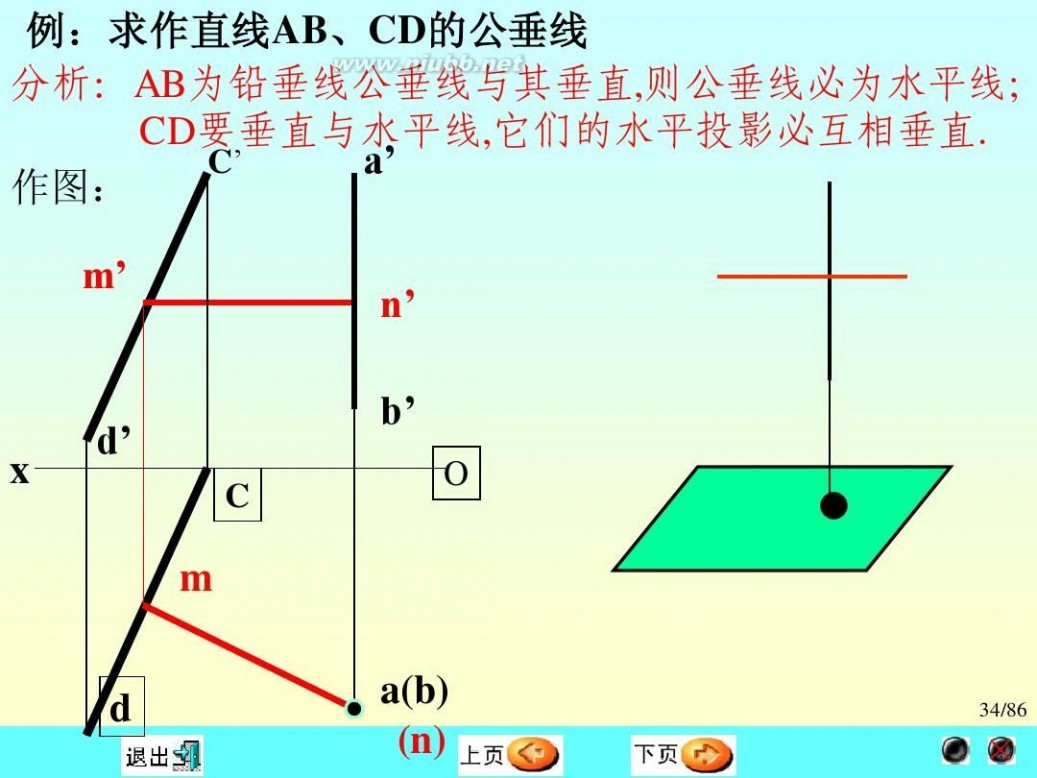
例:求作直线AB、CD的公垂线 求作直线 、 的公垂线 分析:AB为铅垂线公垂线与其垂直,则公垂线必为水平线; CD要垂直与水平线,它们的水平投影必互相垂直. a’ C’ 作图: m’ n’ b’
C O
x
d’ m d
a(b) (n)
34/86
Wang chenggang
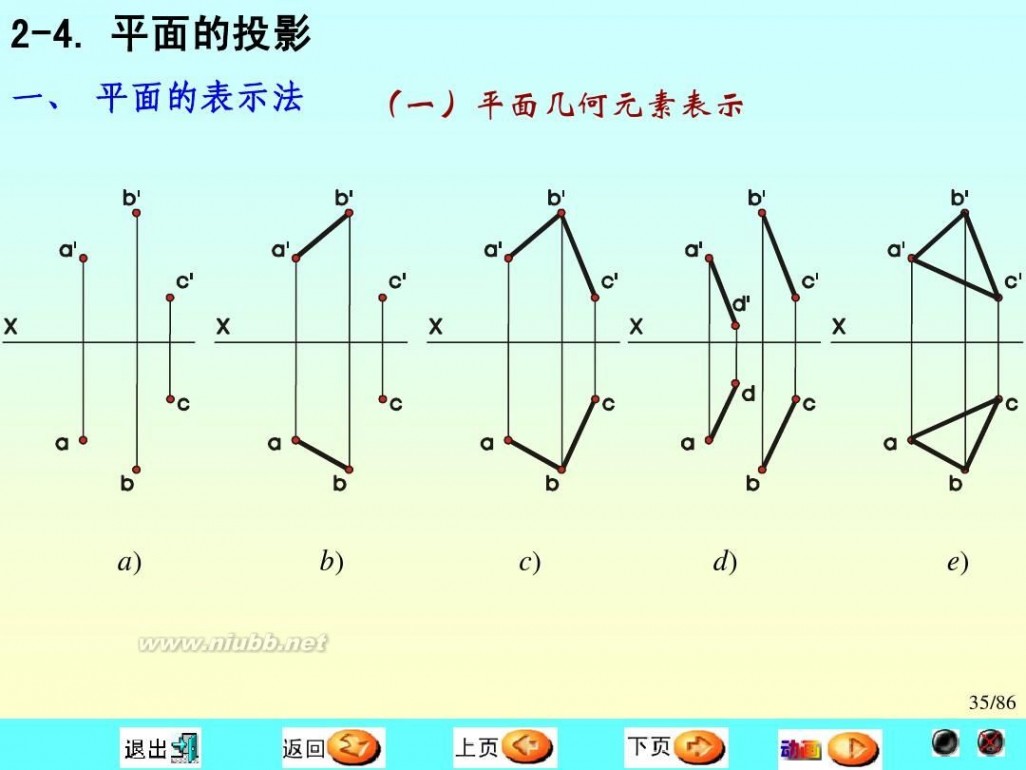
2-4. 平面的投影
一、 平面的表示法 (一)平面几何元素表示
a)
b)
c)
d)
e)
35/86
Wang chenggang
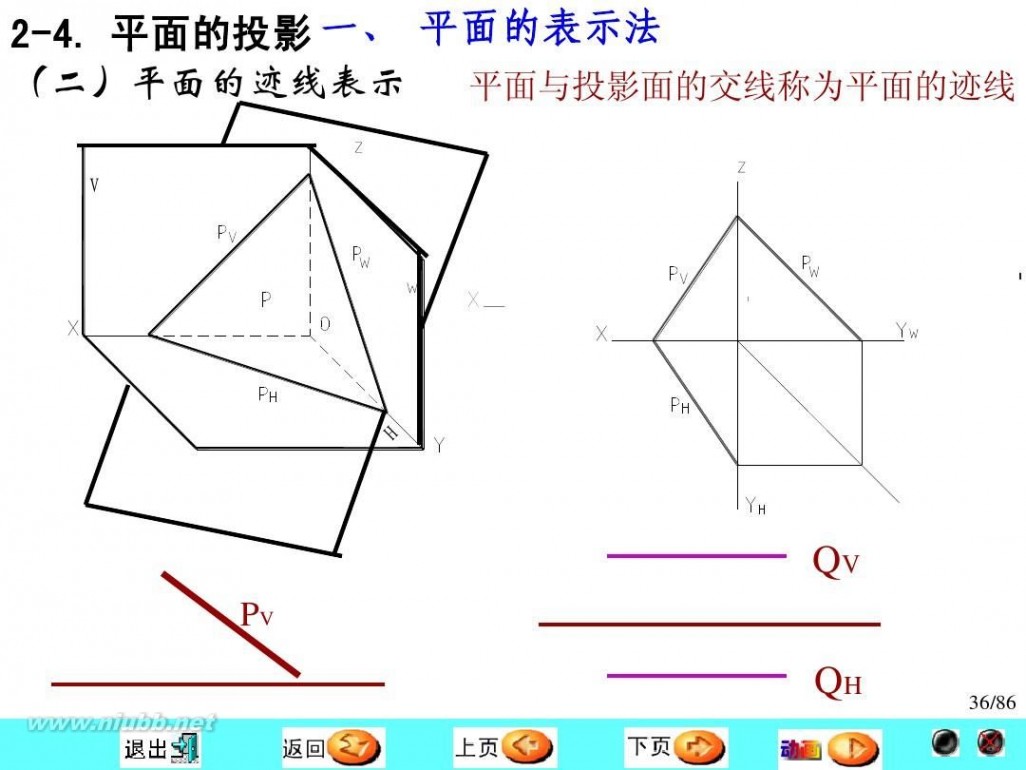
2-4. 平面的投影 一、 平面的表示法 (二)平面的迹线表示 平面与投影面的交线称为平面的迹线
V
H
QV
PV
QH
Wang chenggang
36/86
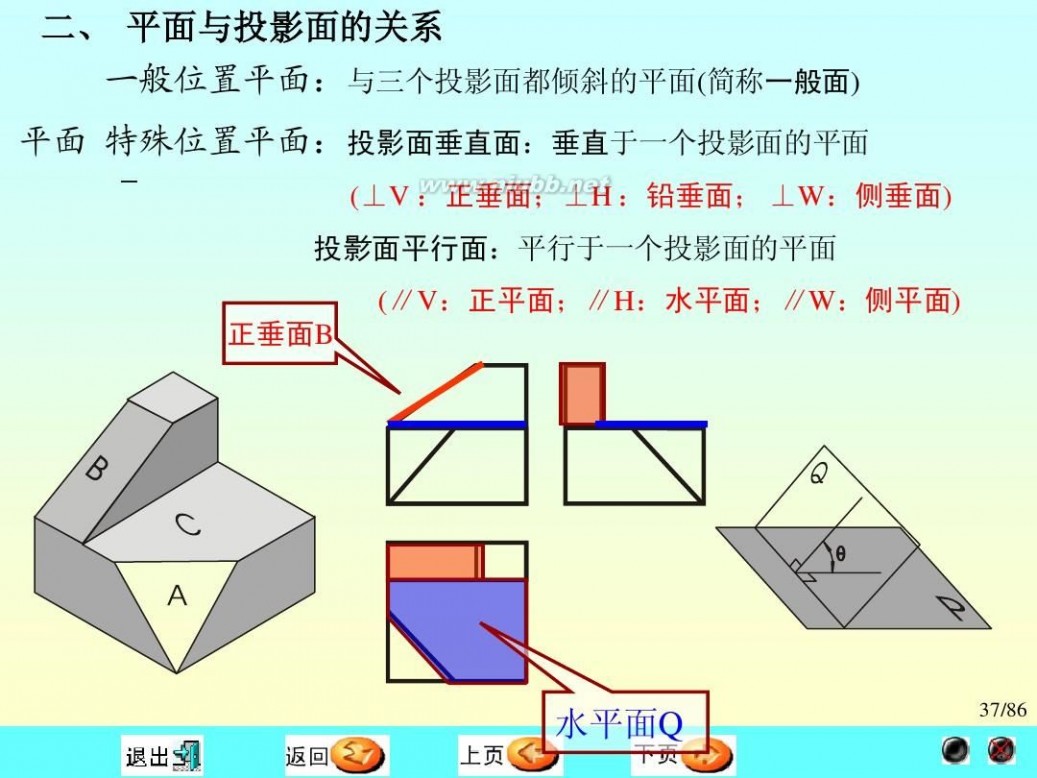
二、 平面与投影面的关系 一般位置平面:与三个投影面都倾斜的平面(简称一般面) 平面 特殊位置平面:投影面垂直面:垂直于一个投影面的平面
(⊥V :正垂面;⊥H :铅垂面; ⊥W:侧垂面) 投影面平行面:平行于一个投影面的平面 (∥V:正平面;∥H:水平面;∥W:侧平面) 正垂面B
37/86
水平面Q
Wang chenggang
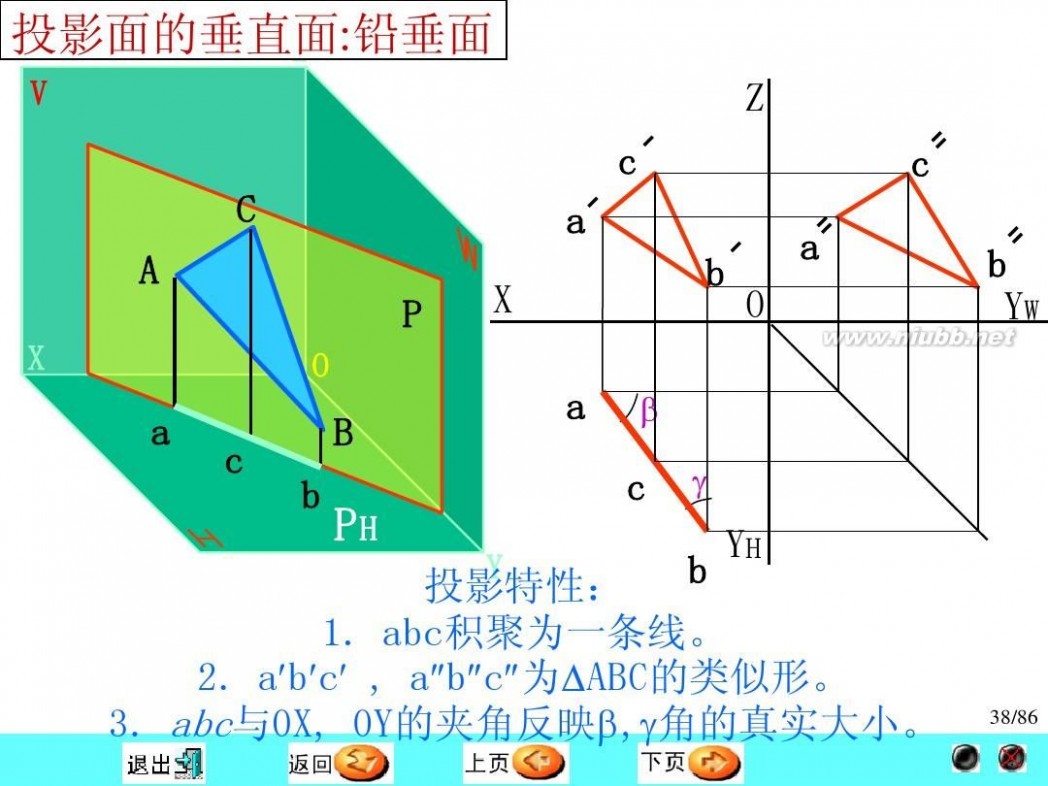
投影面的垂直面:铅垂面 Z
V
Z c C a a A X P b O a a c b c B
γ β O
c b YW
X
PH
YH b 投影特性: 1. a
bc积聚为一条线。 2. a′b′c′ , a″b″c″为?ABC的类似形。 3. abc与OX, OY的夹角反映β,γ角的真实大小。
Wang chenggang
Y
38/86
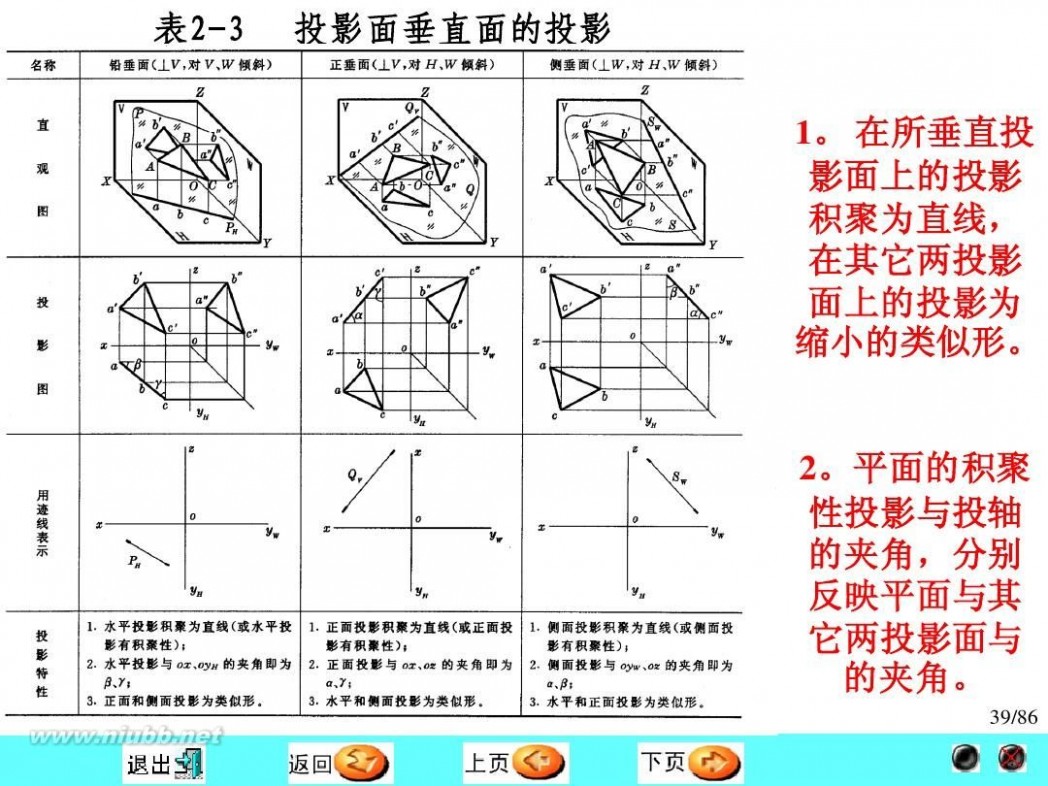
表2-3
投影面垂直面的投影 1。 在所垂直投 。 影面上的投影 积聚为直线, 积聚为直线, 在其它两投影 面上的投影为 缩小的类似形。 缩小的类似形。
2。平面的积聚 。 性投影与投轴 的夹角,分别 的夹角, 反映平面与其 它两投影面与 的夹角。 的夹角。
39/86
Wang chenggang
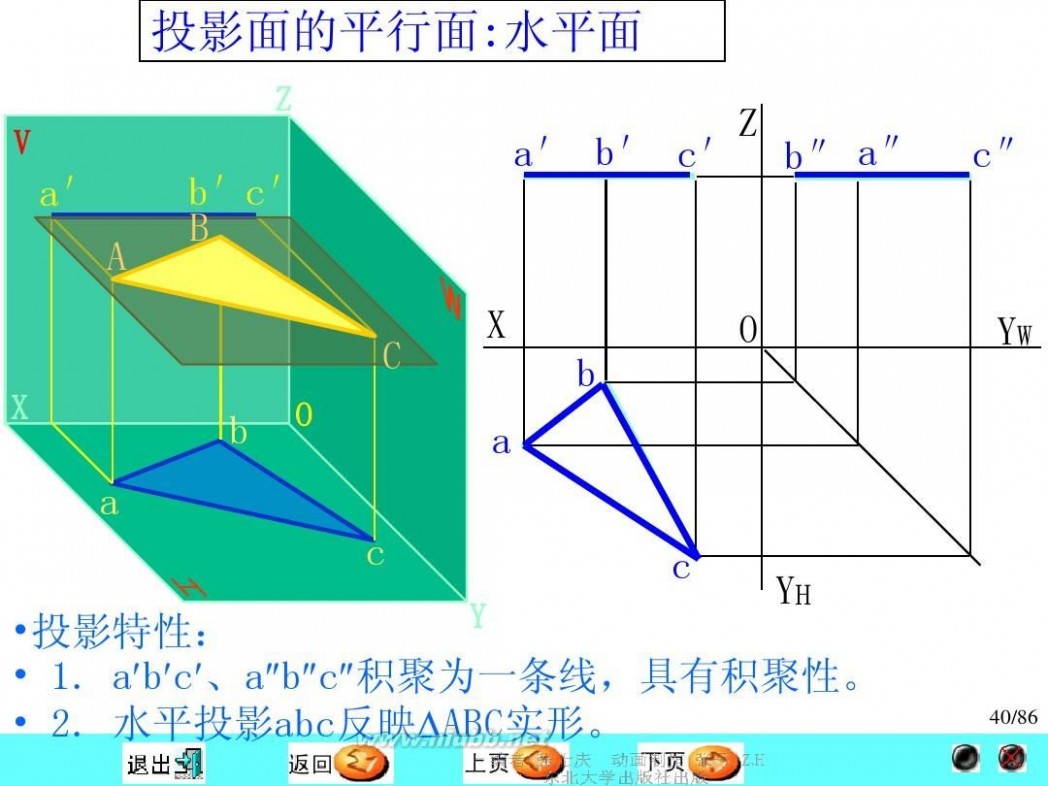
投影面的平行面:水平面
Z V
Z a′ b′ c′ b″ a″ a′ A X C b O b′c′ B
c″
YW
X
O
b a c
a
c YH
Y ?投影特性: ? 1. a′b′c′、a″b″c″积聚为一条线,具有积聚性。 ? 2. 水平投影abc反映?ABC实形。
Wang chenggang
40/86
表2-4
投影面平行面的投影 1。在 所平 。 行投影面上 的投影反映 实形, 实形,在其 它两投影面 上的投影积 聚为直线。 聚为直线。 2. 2.平面的积 聚性投影平 行于相应投 影轴。 影轴。
41/86
Wang chenggang
3、一般位置平面的投影
一般位置平面的三面投影均为类似形
V
H
42/86
Wang chenggang
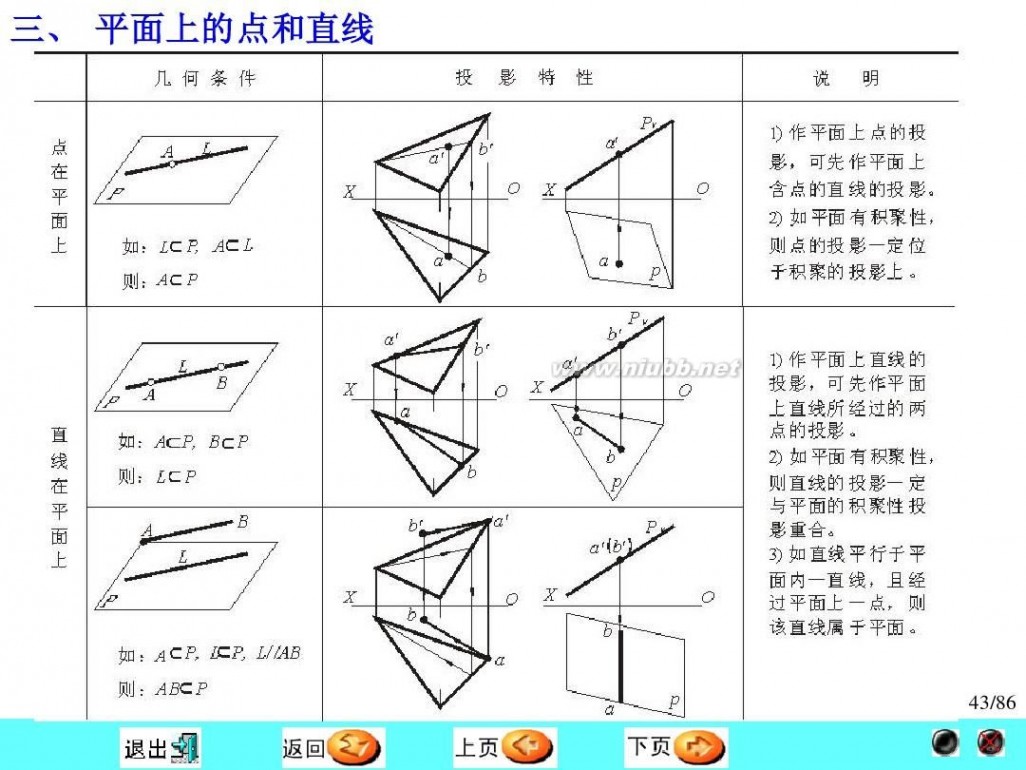
三、 平面上的点和直线
43/86
Wang chenggang
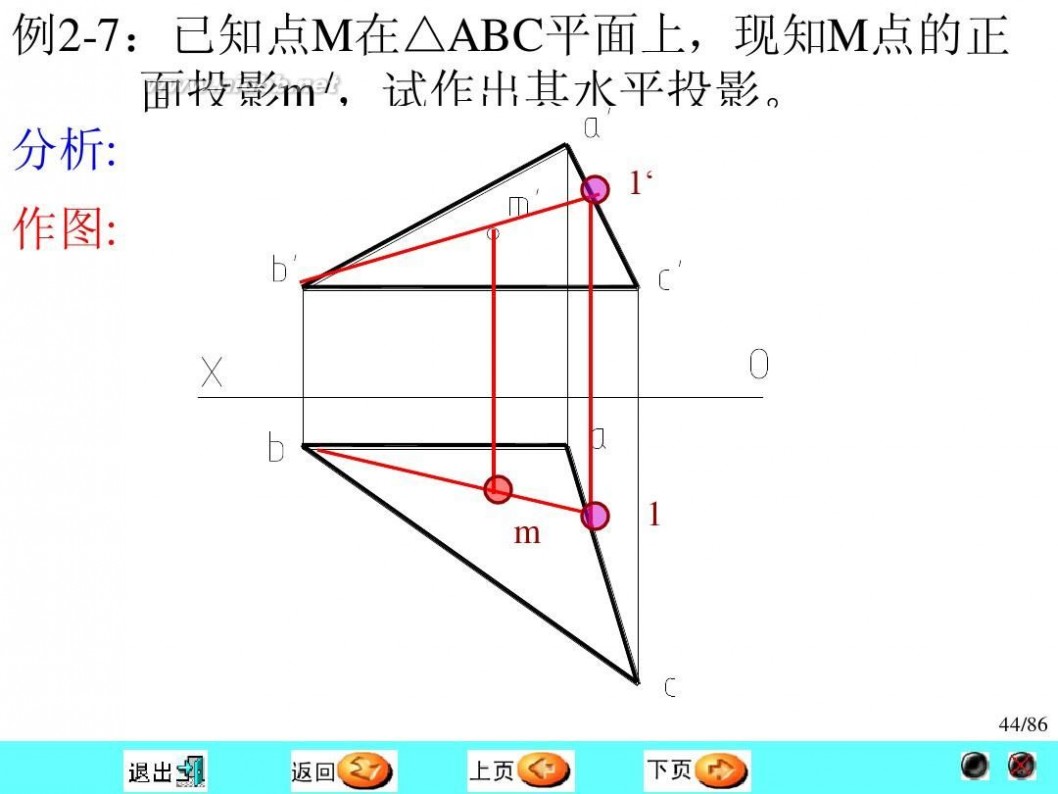
例2-7:已知点M在△ABC平面上,现知M点的正 面投影m /,试作出其水平投影。 分析:
1‘
作图:
m
1
44/86
Wang chenggang
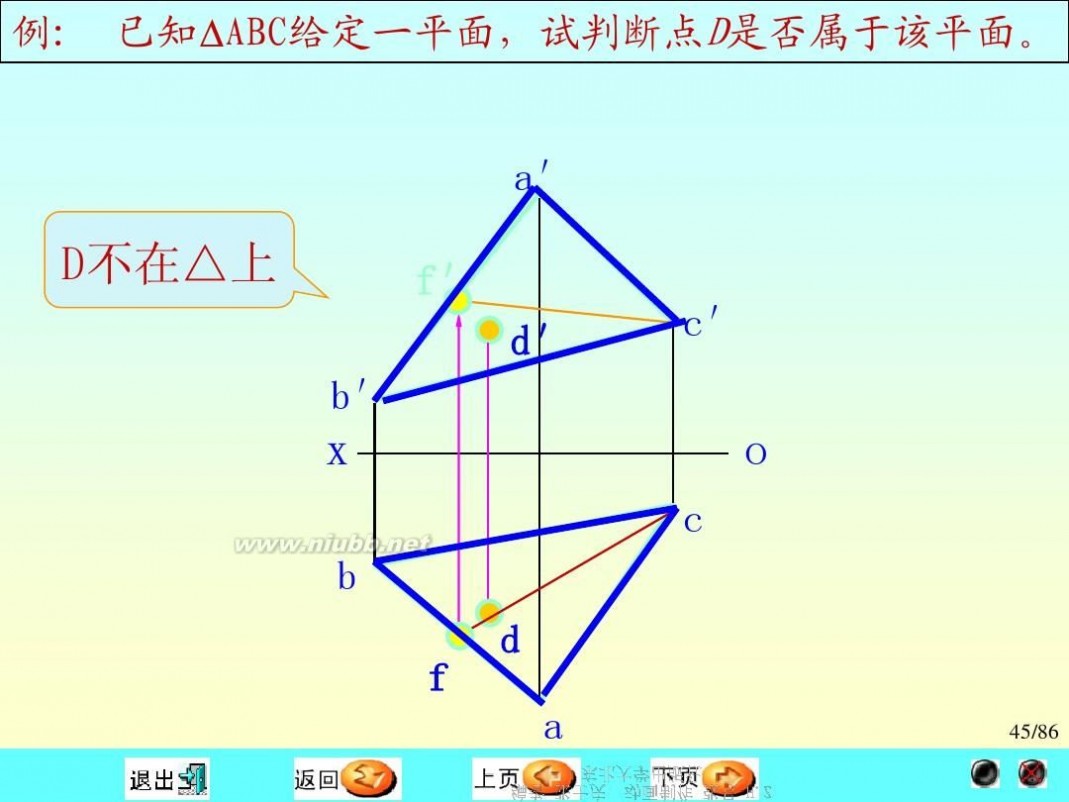
例: 已知?ABC给定一平面,试判断点D是否属于该平面。
a′
D不在△上
f′ c′ d′ b′
x
c b d f a
Wang chenggang
o
45/86
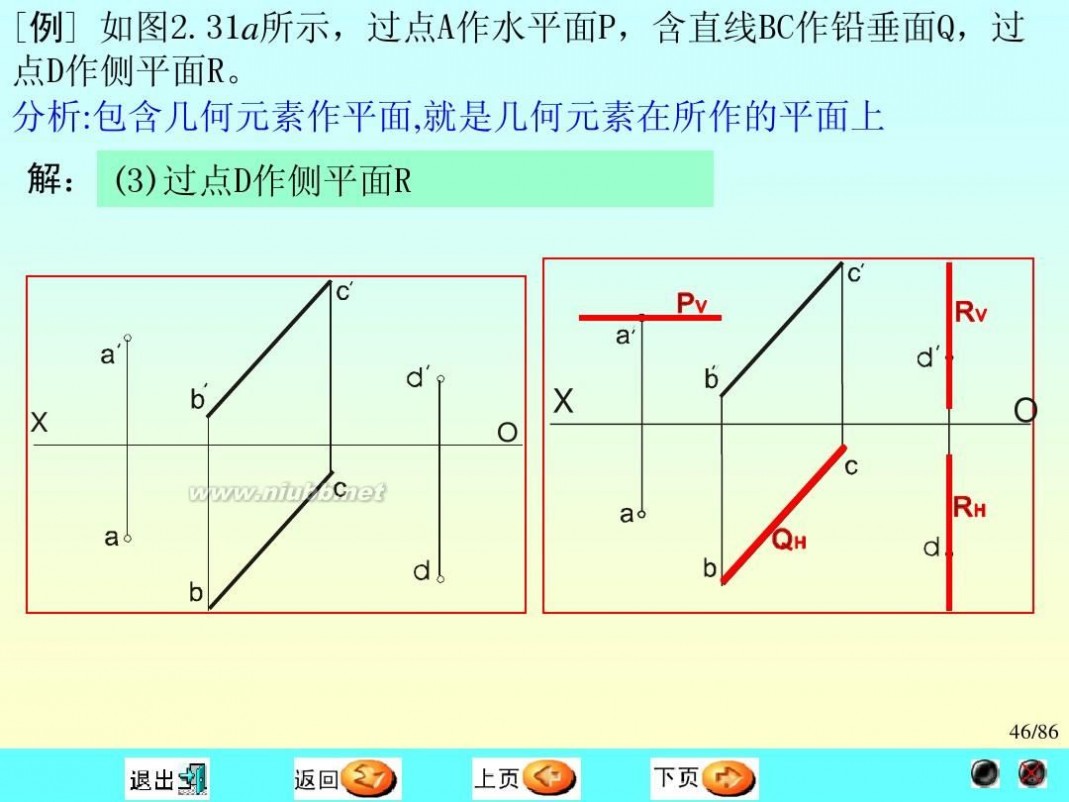
[例] 如图2.31a所示,过点A作水平面P,含直线BC作铅垂面Q,过 点D作侧平面R。 分析:包含几何元素作平面,就是几何元素在所作的平面上 解: (1)过点A作水平面P (3)过点D作侧平面R (2)含直线BC作铅垂面Q
X
O
X
O
46/86
Wang chenggang
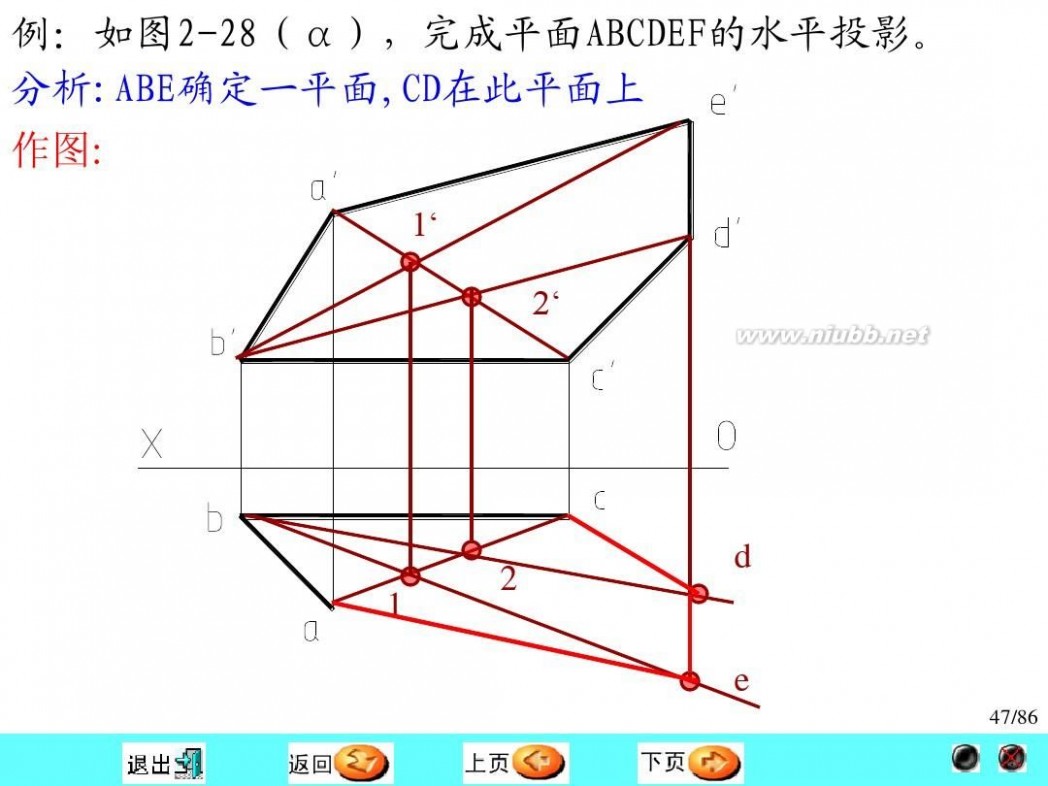
例:如图2-28(α),完成平面ABCDEF的水平投影。 分析:ABE确定一平面,CD在此平面上 作图:
1‘ 2‘
1
2
d
e
47/86
Wang chenggang
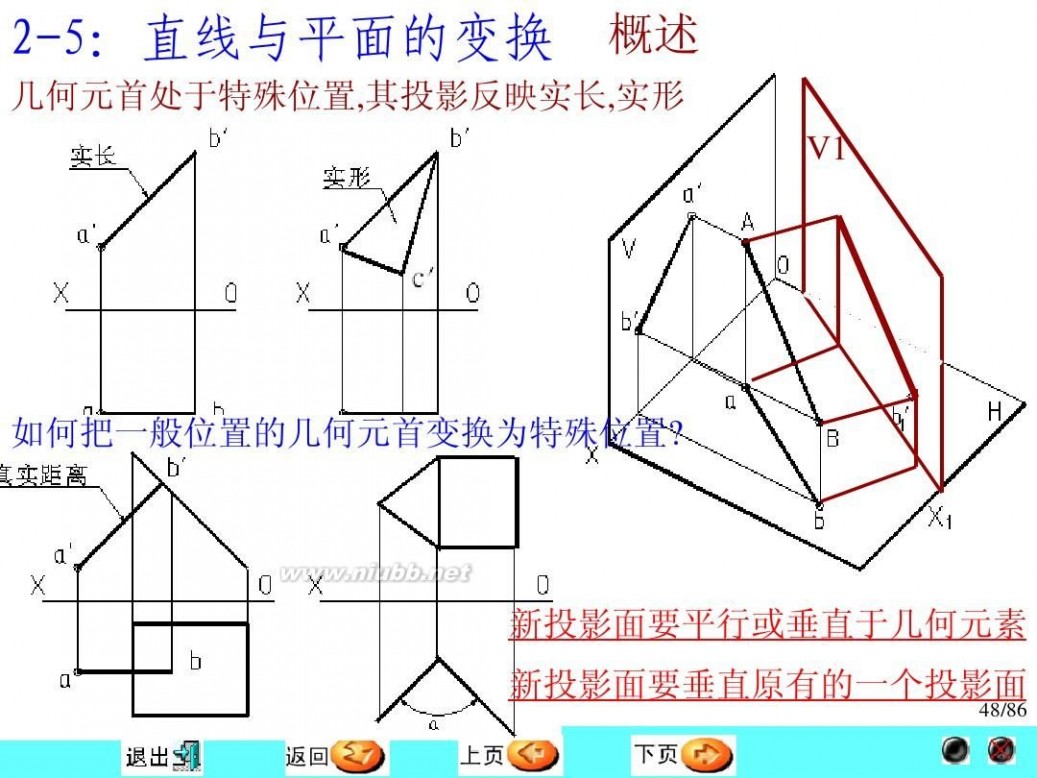
2-5:直线与平面的变换
概述
V1
几何元首处于特殊位置,其投影反映实长,实形
如何把一般位置的几何元首变换为特殊位置?
新投影面要平行或垂直于几何元素 新投影面要垂直原有的一个投影面
48/86
Wang chenggang
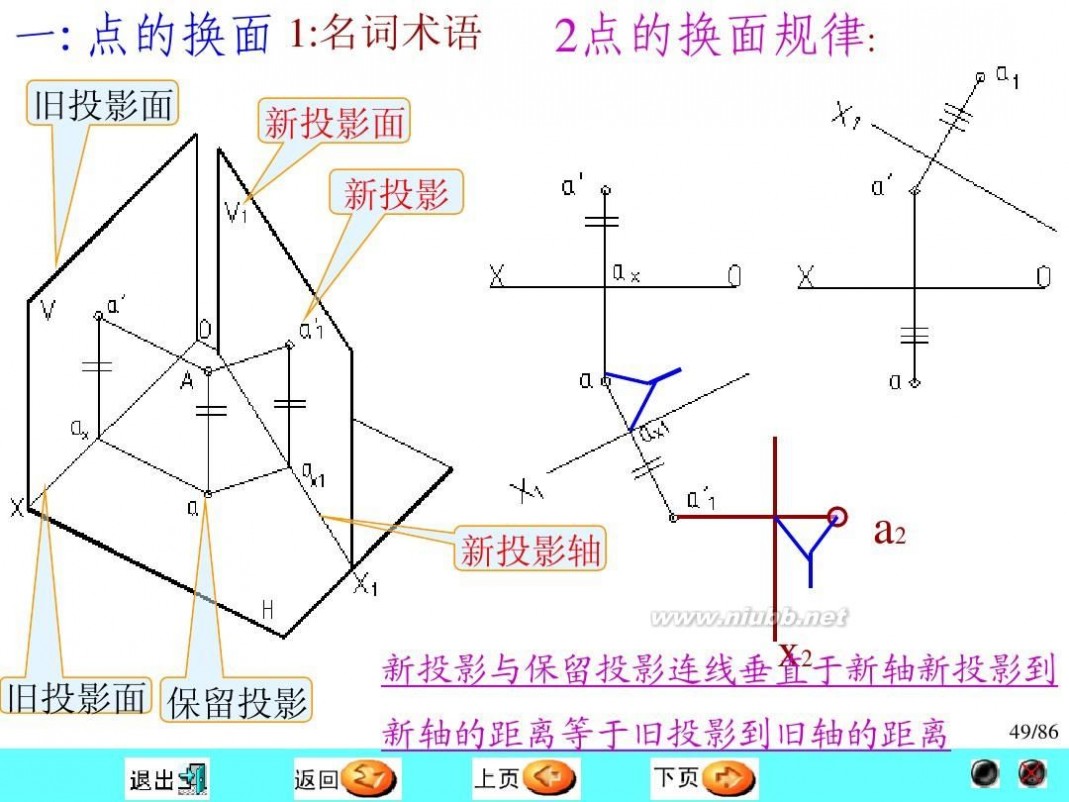
一:点的换面 1:名词术语
旧投影面 新投影面 新投影
2点的换面规律:
a2
新投影轴
x2 新投影与保留投影连线垂直于新轴新投影到
旧投影面 保留投影 新轴的距离等于旧投影到旧轴的距离
Wang chenggang
49/86
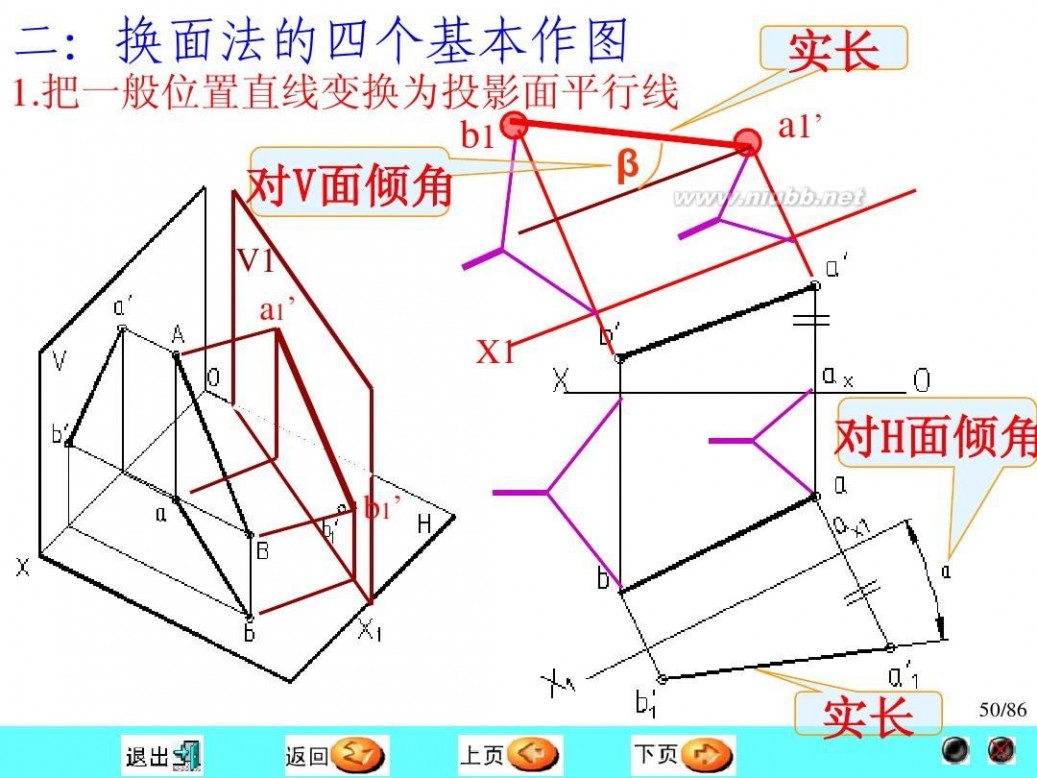
二:换面法的四个基本作图
1.把一般位置直线变换为投影面平行线 b1’ β
实长
a1’
对V面倾角
V1 a1 ’ X1
对H面倾角
b1’
50/86
实长
Wang chenggang
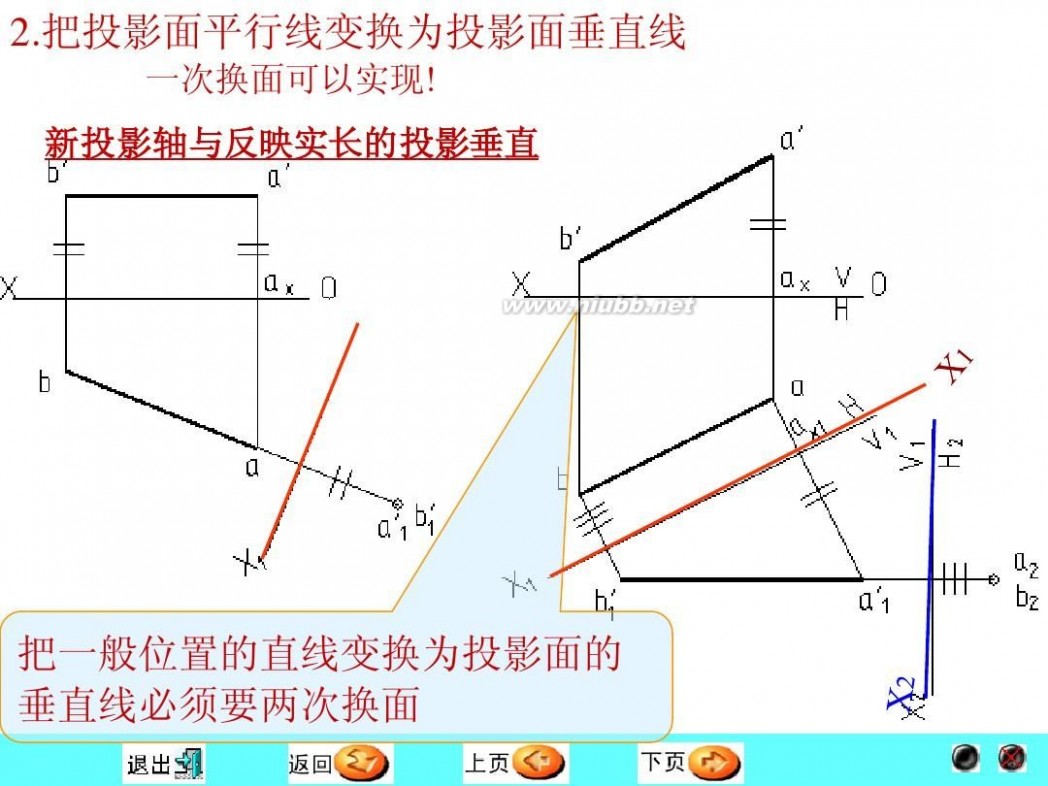
2.把投影面平行线变换为投影面垂直线
一次换面可以实现! 新投影轴与反映实长的投影垂直
把一般位置的直线变换为投影面的 垂直线必须要两次换面
Wang chenggang
51/86
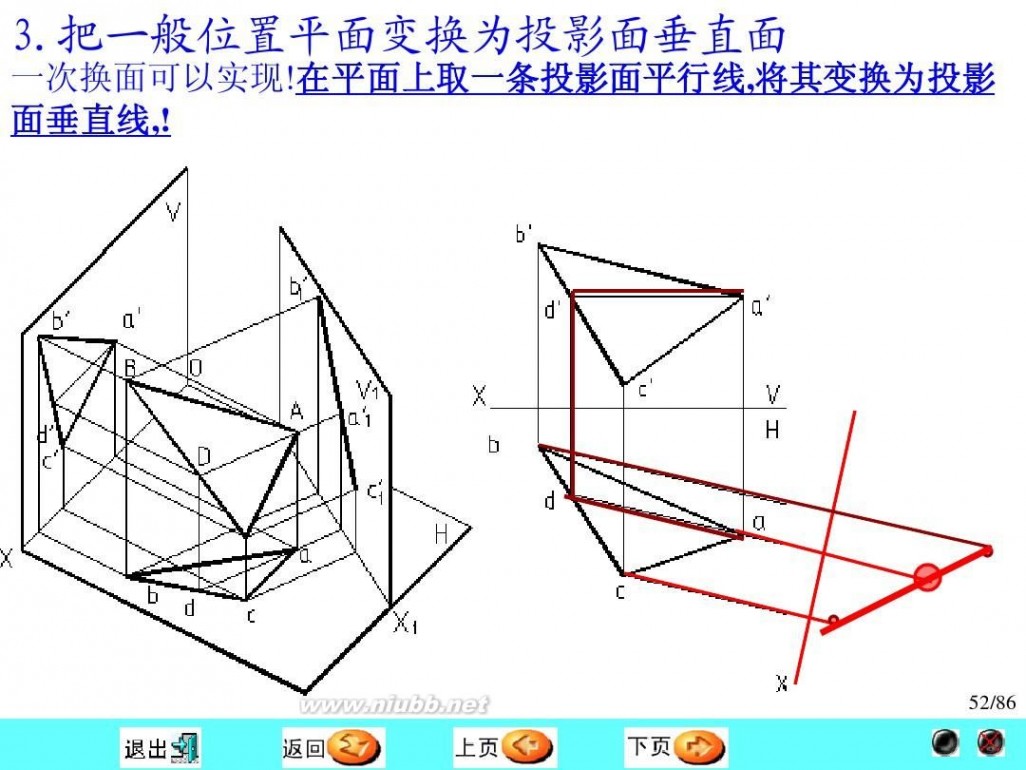
3.把一般位置平面
变换为投影面垂直面
一次换面可以实现!在平面上取一条投影面平行线 将其变换为投影 在平面上取一条投影面平行线,将其变换为投影 在平面上取一条投影面平行线 面垂直线,! 面垂直线
52/86
Wang chenggang
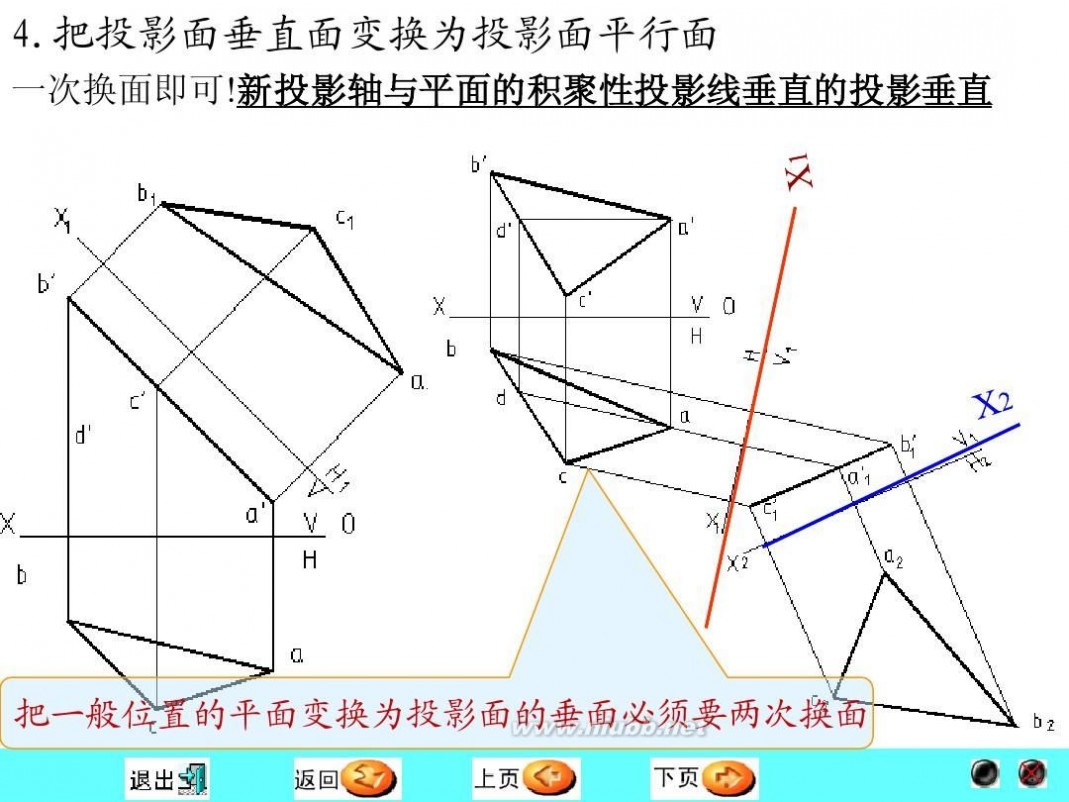
4.把投影面垂直面变换为投影面平行面
一次换面即可!新投影轴与平面的积聚性投影线垂直的投影垂直 新投影轴与平面的积聚性投影线垂直的投影垂直
把一般位置的平面变换为投影面的垂面必须要两次换面
Wang chenggang
53/86
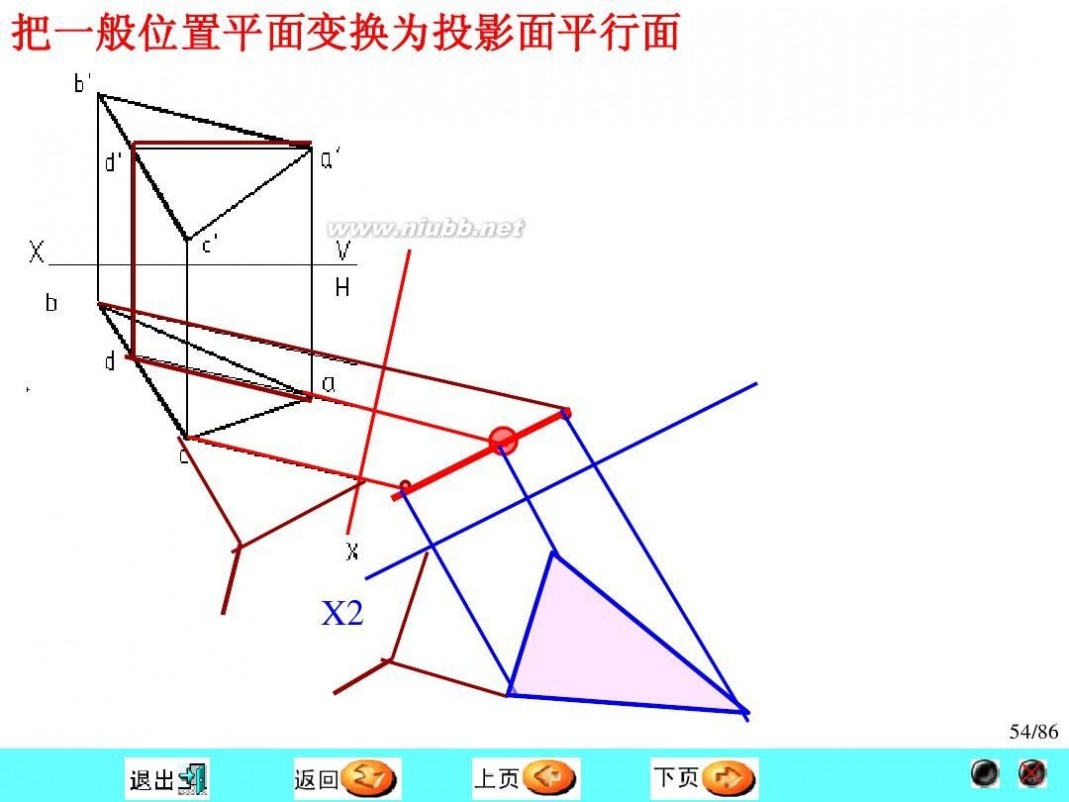
把一般位置平面变换为投影面平行面
X2
54/86
Wang chenggang
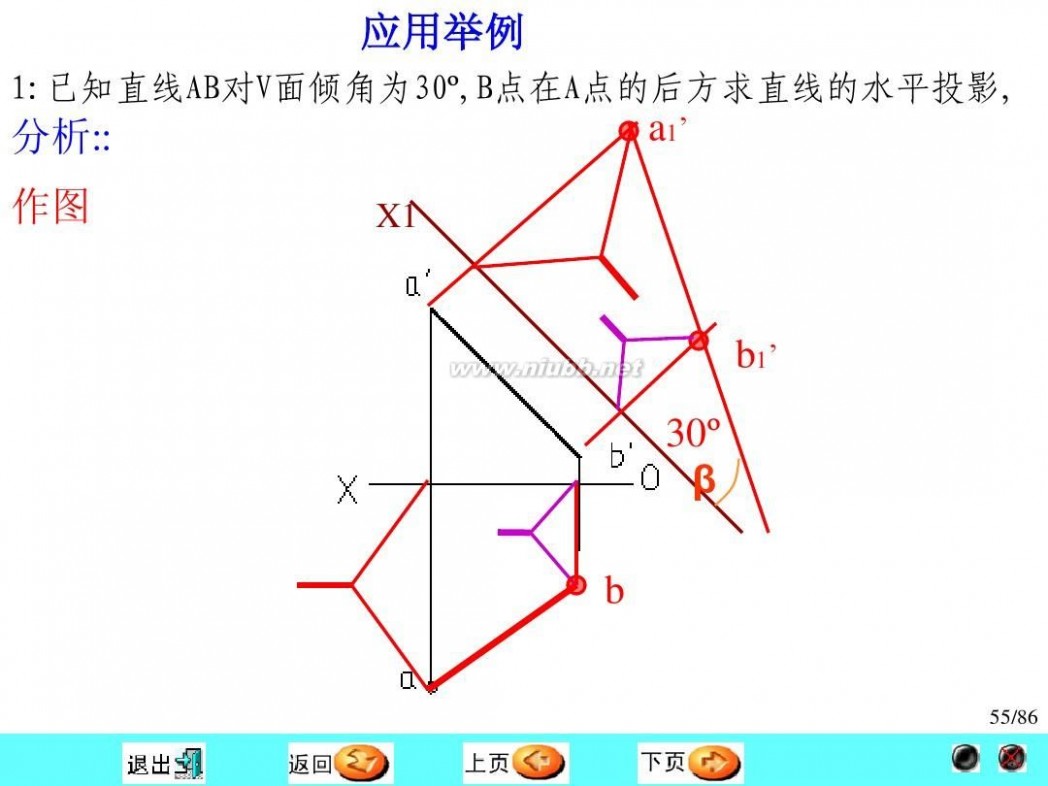
应用举例
1:已知直线AB对V面倾角为30o,B点在A点的后方求直线的水平投影, a1’ 分析::
作图
X1
b1’ 30o β b
55/86
Wang chenggang
三: 应用举例 作图
1:如图所示,试求K点与平面ABC间的距离. 分析::
56/86
Wang chenggang
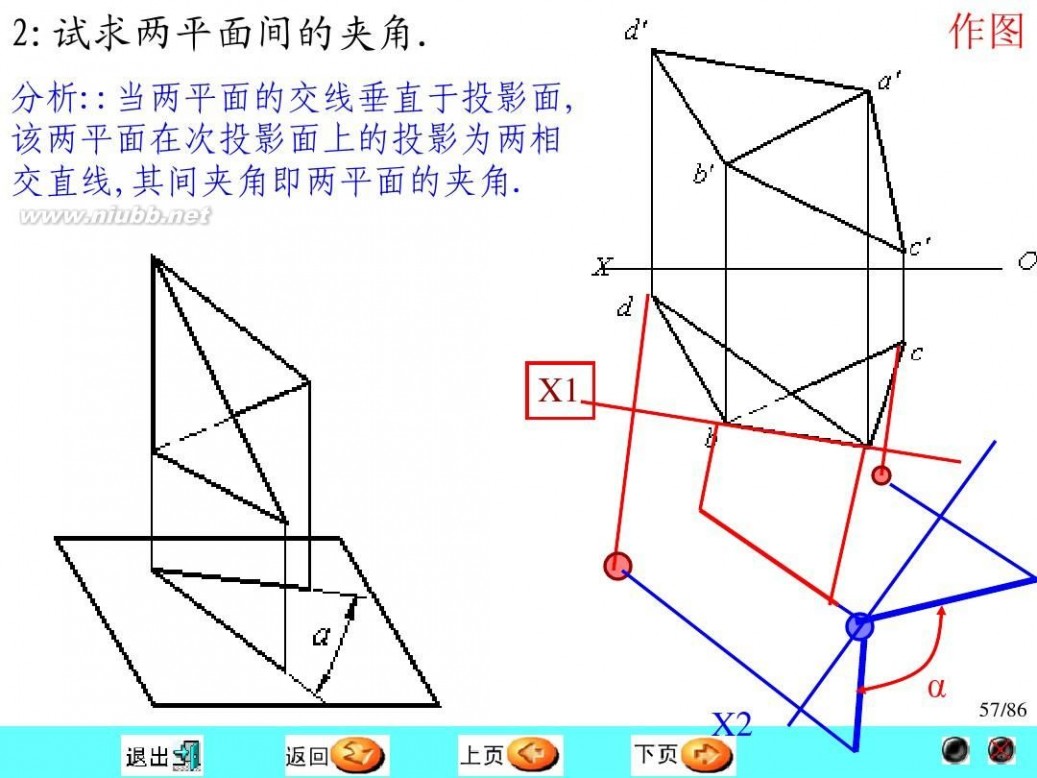
2:试求两平面间的夹角.
分析::当两平面的交线垂直于投影面, 该两平面在次投影面上的投影为两相 交直线,其间夹角即两平面的夹角.
作图
X1
? X2
Wang chenggang
57/86
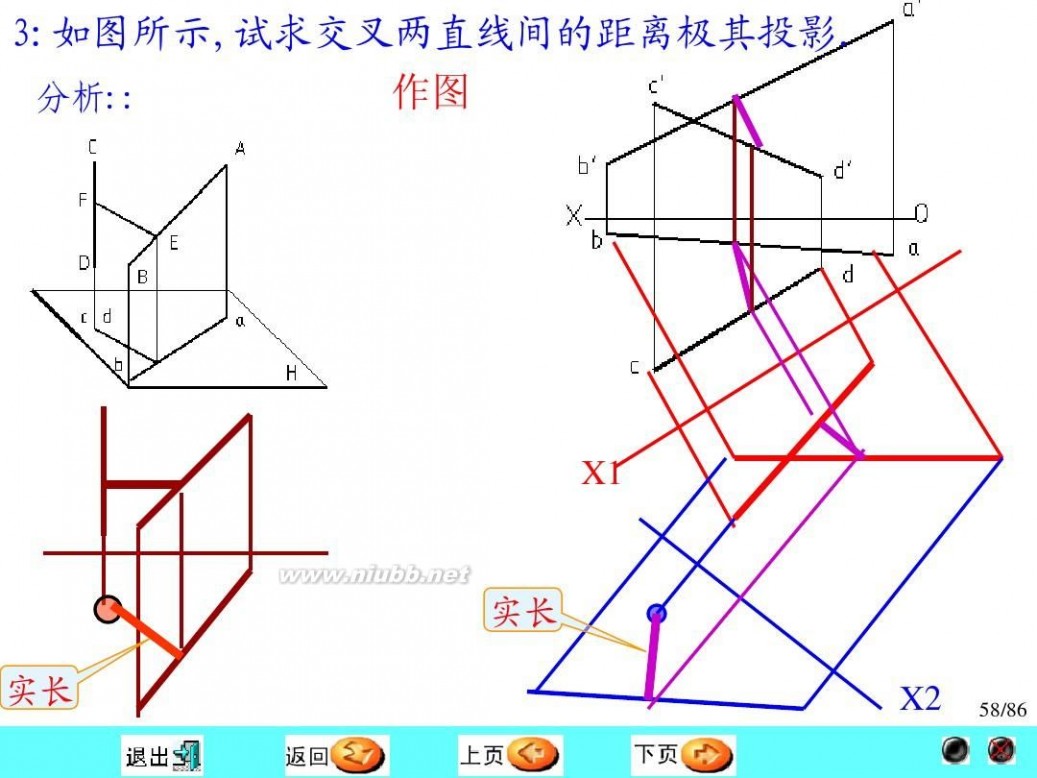
3:如图所示,试求交叉两直线间的距离极其投影. 作图 分析::
X1
实长 实长
Wang chenggang
X2
58/86
作业
P9,P10
59/86
Wang chenggang
三 : 画法几何及机械制图
画 法 几 何 及 机 械 制 图61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1