一 : 双全桥步进电机专用驱动芯片L298中文资料
双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver )L298中文资料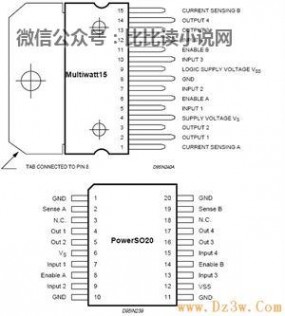

未完待续,更多精彩请关注比比读小说网微信公众号
二 : 基于51单片机的直流电机驱动(L298)
L298是SGS公司的产品,L29(www.61k.com)8N为15个管角的单块集成电路,高电压,高电流,四通道驱动,设计用L298N来接收DTL或者TTL逻辑电平,驱动感性负载(比如继电器,直流和步进马达)和开关电源晶体管。内部包含4通道逻辑驱动电路,其额定工作电流为1A,最大可达1.5A,Vss电压最小4.5V,最大可达36V;Vs电压最大值也是36V。L298N可直接对电机进行控制,无须隔离电路,可以驱动双电机。
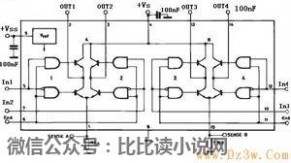
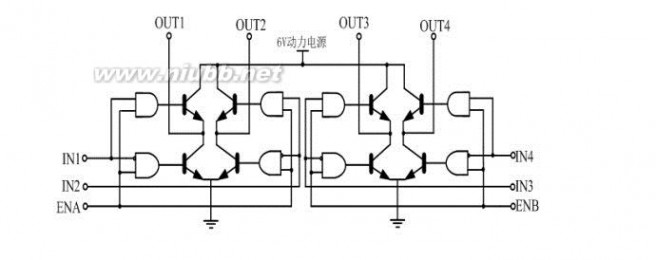
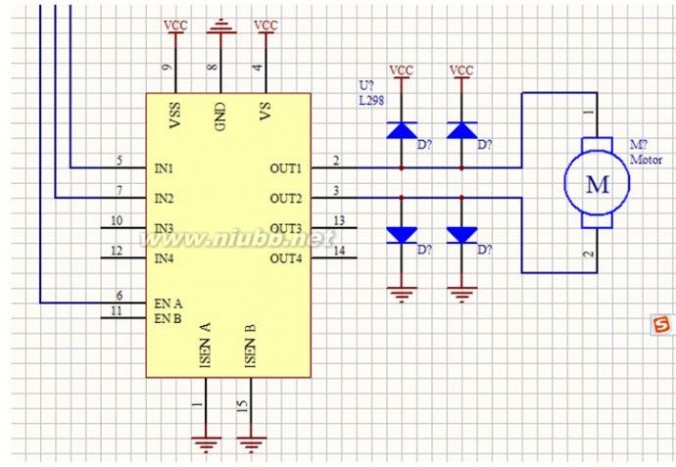
1,L298内部的原理图
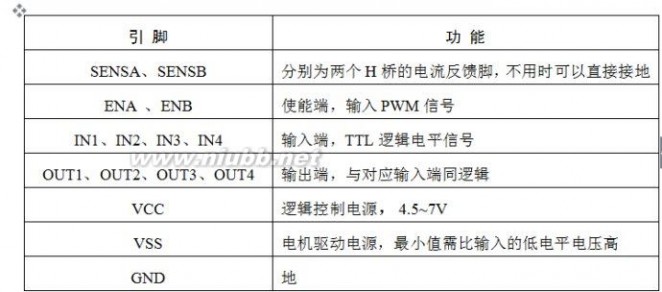
2,L298引脚符号及功能
3,L298的逻辑功能

当使能端为高电平时,输入端IN1为PWM信号,IN2为低电平信号时,电机正转;输入端IN1为低电平信号,IN2为PWM信号时,电机反转;;IN1与IN2相同时,电机快速停止。当使能端为低电平时,电动机停止转动。
在对直流电动机电压的控制和驱动中,半导体功率器件(L298)在使用上可以分为两种方式:线性放大驱动方式和开关驱动方式在线性放大驱动方式。
半导体功率器件工作在线性区优点是控制原理简单,输出波动小,线性好,对邻近电路干扰小,缺点为功率器件工作在线性区,功率低和散热问题严重。开关驱动方式是使半导体功率器件工作在开关状态,通过脉调制(PWM)来控制电动机的电压,从而实现电动机转速的控制。
#include
#include
#defineuchar unsigned char
#defineuint unsigned int
sbitMOTOR_A_1=P3^6;
sbitMOTOR_A_2=P3^7;
sbitk1=P1^0; //定义k1为p1.0口
sbitk2=P1^1; //定义k2为p1.1口
sbitk3=P1^2; //定义k3为p1.2口
sbitk4=P1^3; //定义k4为p1.3口
uchar T=0; //定时标记
uchar W=0; //脉宽值 0~100
uchar A=0; //方向标记 0,1
uchar k=0; //按键标记
uchar i=0; //计数变量
uchar codetable1[]={
0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71};
uchar codetable2[]={0xfe,0xfb,0xfd,0xf7};
voiddelayms(uint t);
voiddisp(void)
{
P2=table2[3];
P0=table1[W]; //显示占空比个位
delayms(1); //延时1ms
P2=0xff;//P0清1
P2=table2[2];
P0=table1[W/100]; //显示占空比百位
delayms(1); //延时1ms
P2=0xff;//P0清1
P2=table2[1];
P0=table1[W/10]; //显示占空比十位
delayms(1); //延时1ms
P2=0xff; //P0清1
P2=table2[0];
P0=table1[A]; //显示方向
delayms(1); //延时1ms
P2=0xff;//P0清1
}
voidinit(void)
{
//启动中断
TMOD=0x01;
EA=1;
ET0=1;
TR0=1;
//设置定时时间
TH0=0xff;
TL0=0xf6;
}
voidtimer0() interrupt 1
{
//重置定时器时间
TH0=0xff;
TL0=0xf6;
T++;//定时标记加1
disp();//数码管显示
if(k==0)
{
if(T>W)
MOTOR_A_1=0;
else
MOTOR_A_1=1;
}
else
{
if(T>W)
MOTOR_A_2=0;
else
MOTOR_A_2=1;
}
if(T==100)
T=0;
}
voiddelayms(uint t)
{
ucharj;
while(t--)
{
for(j=0;j<250;j++) //循环250次
{
_nop_(); //系统延时
_nop_();//系统延时
_nop_();//系统延时
_nop_();//系统延时
}
}
}
voidkey(void) //按键判断程序
{
if(k1==0)//按键1按下
{
while(k1==0); //按键1抬起
if(W==100)//如果脉宽为100
W=0;//脉宽置0
else
W+=1;//否则加1
}
elseif(k2==0) //按键2按下
{
while(k2==0); //按键2抬起
if(W==0)//如果脉宽为0
W=100;//脉宽设置成100
else
W-=1;//否则减1
}
elseif(k3==0) //按键3按下
{
while(k3==0); //按键3抬起
A=!A;//方向标记取反
k=!k;//按键标记取反
}
elseif(k4==0) //按键4按下
{
while(k4==0); //按键4抬起
W=0;//脉宽清0
}
}
voidmain(void)
{
init();/////////系统初始化
while(1)
{
if(k==0)
MOTOR_A_2=0;
else
MOTOR_A_1=0;
key();////////查询按键
}
}
本文标题:l298驱动直流电机-双全桥步进电机专用驱动芯片L298中文资料61阅读| 精彩专题| 最新文章| 热门文章| 苏ICP备13036349号-1